Установить Вконтакте на телефон
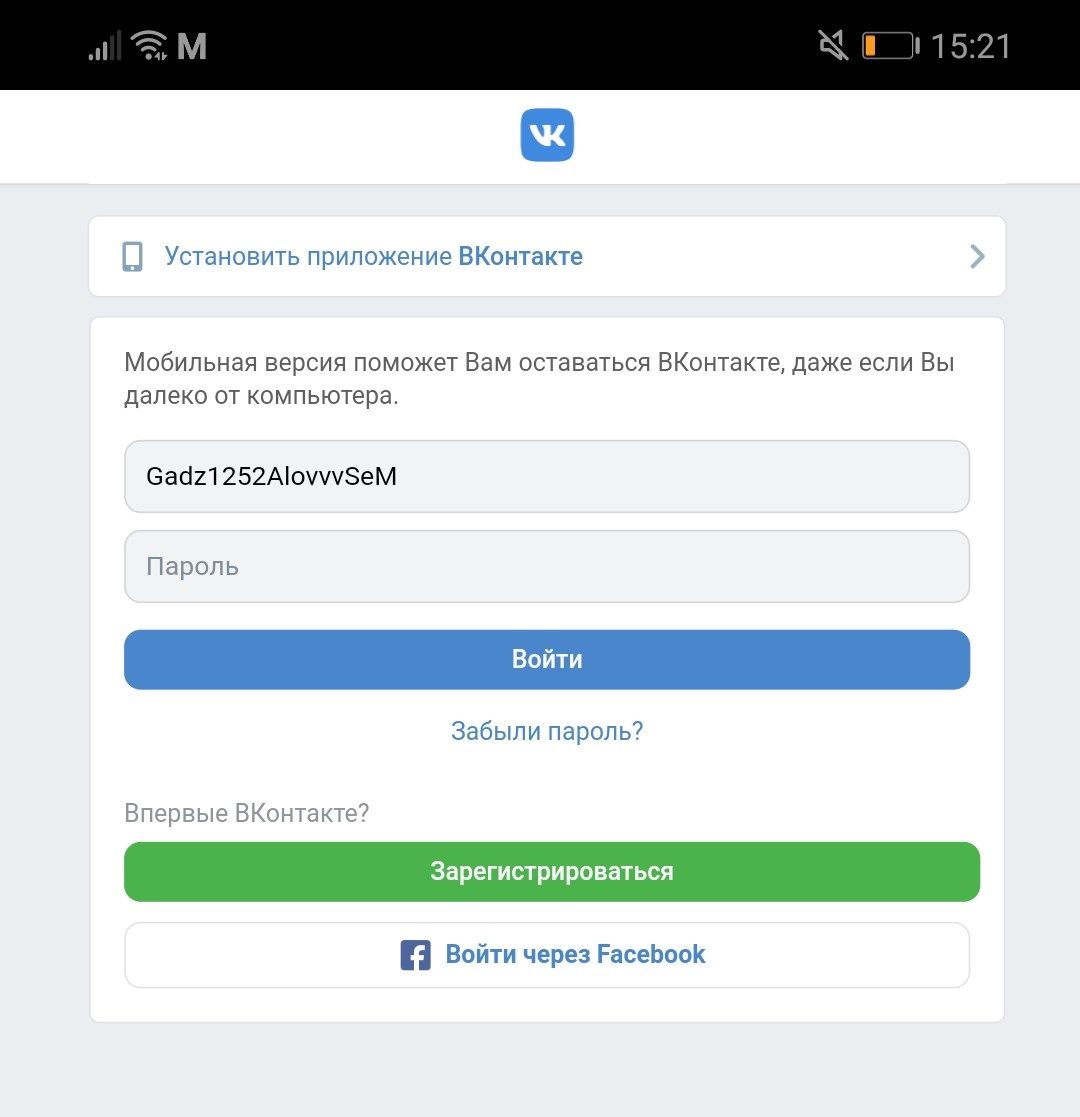
В этом обзоре мы поговорим подробно о том, как установить Вконтакте на телефон бесплатно и без каких-либо заморочек. Если вы будете устанавливать приложение Вконтакте на свой телефон, следуя инструкции, подробно изложенной в данном посте, то, вне всяких сомнений, у вас с этим никаких трудностей, вопросов и подводных камней не возникнет. С развитием мобильных технологий и беспроводного Интернета, все больше времени пользователи проводят во Вконтакте, используя свои смартфоны. Уже давно популярные (и не очень) сайты имеют мобильные версии, что значительно упрощает серфинг с телефона. Есть отличная мобильная версия и у ВК. Если вы об этом не знали или просто не задумывались, этот пост заслуживает вашего внимания. Прочитав его, вы узнаете, как войти в мобильную версию сайта Вконтакте с телефона или же с персонального компьютера. Помимо мобильной версии, разработчики потрудились также над отдельными приложениями для самых популярных мобильных систем, таких как: Android, ИОС и Windows Phone.
Если вы войдете на главную страницу Вконтакте, то внизу как раз сможете увидеть ссылки на скачивание официального приложения для всех операционных систем (смотрите 1, 2, 3 на скриншоте выше). Все ссылки на страницы с приложениями в официальных магазинах Гугл, Эппл и Майкрософт.
Установить приложение Вконтакте на телефон по инструкции
Рассмотрим подробно алгоритм установки приложения Вконтакте на мобильный телефон, а точнее – на айфрн. Распишем далее подробную пошаговую инструкцию этого процесса.
- Первое, что нужно сделать, это найти в своем смартфоне иконку магазина приложений – App Store. Нашли? Коснитесь иконки, чтобы посетить магазин приложений, как показано на скриншоте 1 внизу.
- Откроется окно (смотрите рисунок 2 внизу). В этом окне (справа внизу) тапните по иконке поиска (снова картинка 2).
- Далее уже в новом окне (рисунок 3) в строке поиска наберите две латинские буквы: «vk» и нажмите синюю кнопку: «Search»
- Первым в выдаче и будет заветное приложение ВК.
 Если вы устанавливаете его впервые, то справа будет кнопка: «Загрузить». Если оно уже когда-либо было на вашем айфоне, то вы увидите изображение облака со стрелкой. Коснитесь этой иконки, чтобы запустить процедуру установки, как показано на скриншоте 4 внизу.
Если вы устанавливаете его впервые, то справа будет кнопка: «Загрузить». Если оно уже когда-либо было на вашем айфоне, то вы увидите изображение облака со стрелкой. Коснитесь этой иконки, чтобы запустить процедуру установки, как показано на скриншоте 4 внизу. - Кстати, у нас на сайте уже есть публикация, посвященная скачиванию ВК на айфон. Если этой инструкции вам недостаточно, тогда ознакомьтесь с постом по ссылке вверху.
 Если вы устанавливаете его впервые, то справа будет кнопка: «Загрузить». Если оно уже когда-либо было на вашем айфоне, то вы увидите изображение облака со стрелкой. Коснитесь этой иконки, чтобы запустить процедуру установки, как показано на скриншоте 4 внизу.
Если вы устанавливаете его впервые, то справа будет кнопка: «Загрузить». Если оно уже когда-либо было на вашем айфоне, то вы увидите изображение облака со стрелкой. Коснитесь этой иконки, чтобы запустить процедуру установки, как показано на скриншоте 4 внизу.- Вернемся к установке приложения. После завершения загрузки/установки иконка с изображением облака сменится на кнопку с надписью: «Открыть». Коснитесь её, чтобы запустить приложение Вконтакте, как показано на пятом рисунке вверху. Или можете выйти с магазина и запустить любимое приложение, тапнув по соответствующей иконке (скриншот 6 вверху).
Установить Вконтакте на телефон бесплатно
 Некоторые манипуляции даже легче даются с телефона. Вы можете, не входя на свою страницу во Вконтакте с ПК, заказать у нас нужное число лайков, и смотреть сразу не телефоне, как люди отмечают ваш пост.
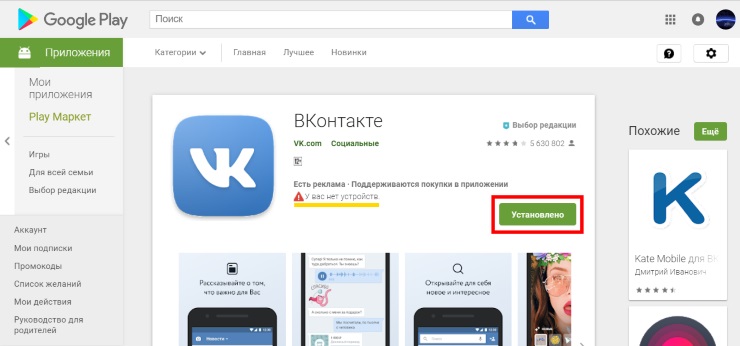
Некоторые манипуляции даже легче даются с телефона. Вы можете, не входя на свою страницу во Вконтакте с ПК, заказать у нас нужное число лайков, и смотреть сразу не телефоне, как люди отмечают ваш пост.Отметим еще один важный нюанс установки ВК. Как вы видите установили мы Вконтакте на телефон бесплатно, ни на каком этапе мы не платили за скачивание, у нас не просили никуда отправлять СМС, чтобы в последствии получить какие-то коды подтверждения. Это не зависит от системы, не важно, какая у вас ОС. Во всех «сторах» приложение VK App бесплатное. Пользователи с Андроидом могут в этом убедиться на странице: «play.google.com/store/apps/details?id=com.vkontakte.android» (скриншот внизу). Точно также и у девайсов на основе Windows. Установка тоже очень простая. Войдите в Play Market. Далее отыщите VK. Войдите на страницу и загрузите приложение на телефон. Если на какой-нибудь стадии по тем или иным причинам у вас запросят плату – ни в коем случае не соглашайтесь, ведь можно сказать почти с максимальной уверенностью о том, что вы попали на мошенников.
Библиотека vk для работы с VK API на Python / Хабр
Привет, Хабр! Данная статья предназначена для тех, кто хочет разобраться с основами VK API на Python, так как статей по этому поводу нет (на Хабре есть одна статья, но она уже не совсем актуальна, так как некоторые методы не работают), а на других ресурсах мне удалось найти только вопросы пользователей, но никаких гайдов и прочего.
Для работы с VK API в Python есть две популярные библиотеки: vk и vk_api. Какая из библиотек лучше я судить не возьмусь, но скажу одно: у vk документация слишком мала (поэтому разбирался практически методом тыка) и на английском языке, а у vk_api документация более развернута (поэтому писать о данной библиотеке смысла не вижу) и на русском. Для меня не главное на каком языке документация, но для некоторых пользователей это играет большое значение при выборе.
Для меня не главное на каком языке документация, но для некоторых пользователей это играет большое значение при выборе.
Как вы уже поняли, в данной статье рассматривается работа с библиотекой vk.
Устанавливается данная библиотека следующей стандартной командой:
pip install vkПосле того, как модуль будет установлен, нам необходимо создать приложение на сайте соц.сети. Я думаю, что большинство пользователей умеет это делать, поэтому информацию по этому шагу пропускаю. Если кто не умеет, то гуглим, не стесняемся.
После регистрации приложения нам нужен будет только его ID.
Начнем с авторизации. В принципе, некоторую информацию можно получить и без ввода личных данных, что конечно же хорошо, например:
import vk
session = vk.Session()
vk_api = vk.API(session)
vk_api.users.get(user_id=1)
Таким образом мы получим фамилию, имя и id пользователя с user_id = 1. Если вам нужно получить еще какую-то информацию о пользователе, то в вызове метода нужно указать дополнительные поля, информация о которых должна быть возвращена:
vk_api. users.get(user_id=1, fields=’online, last_seen’)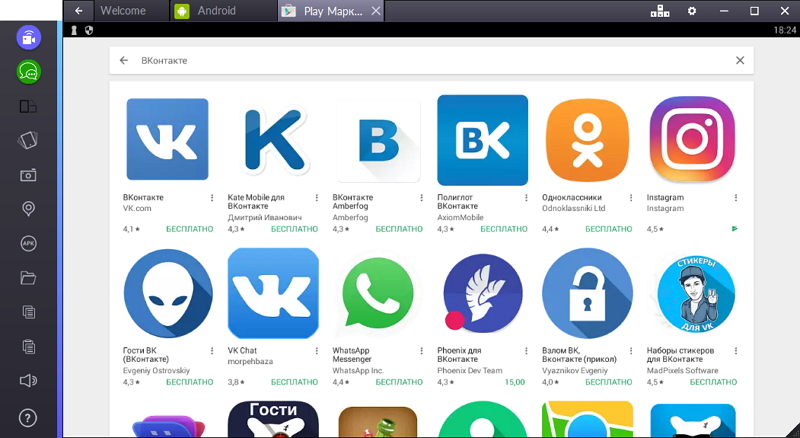 users.get(user_id=1, fields=’online, last_seen’)
users.get(user_id=1, fields=’online, last_seen’)Т.е. в данном случае мы получим не только информацию об имени и фамилии пользователя с id=1, но и информацию о том, находится ли пользователь сейчас на сайте (fields=’online’) и время последнего посещения, а также тип устройства (fields=’ last_seen’).
Действия без авторизации не предоставляют нам возможность использования VK API на полную мощь, поэтому рассмотрим авторизацию с вводом личных данных. Есть два способа: ввод логина и пароля, ввод токена. Чтобы авторизоваться с помощью токена нужно немного дополнить первый пример, а именно вот эту строку:
session = vk.Session(access_token='tocken')Дальше все остается так же, как и было раньше, без каких-либо изменений.
Следующий способ авторизации – ввод логина и пароля. В данном случае тоже все довольно просто и понятно:
session = vk.AuthSession('id_app', 'login', 'pass')
vk_api = vk.API(session) Как видите, ничего сложного и все настолько просто и понятно, что даже не нуждается в дополнительных комментариях.
При такой авторизации нужно указывать не только логин, пароль и ID приложения, но то, к чему мы хотим получить доступ.
Например, у нас сейчас не указан доступ к стене пользователя, поэтому при попытке добавить запись на стену мы получим ошибку:
vk_api.wall.post(message="hello")
<b>Ошибка: vk.exceptions.VkAPIError: 15.</b>Для того чтобы данный код сработал корректно, при авторизации нужно указать дополнительно аргумент с названием scope и перечислить через запятую те методы, доступ к которым мы хотим получить.
session = vk.AuthSession('id_app', 'login', 'pass', scope=’wall, messages’) vk_api = vk.API(session) vk_api.wall.post(message="hello")
В данном примере я запрашиваю доступ к стене и сообщениям. Выполнение программы завершается корректно, а на стене появляется запись с текстом ‘hello’. Названия методов, к которым возможно получить доступ можно посмотреть
на этой странице документации.
Вот и все. Вызов методов происходит по одному шаблону:
Вызов методов происходит по одному шаблону:
vk_api.метод.название(параметры=значения)
Например: vk_api.messages.send(users_id=0, messages=’hello’)Таким образом мы отправляем сообщение hello пользователю с id = 0 (т.е. самому себе). Названия параметров, которые нужно передавать при вызове какого-либо метода можно найти в документации, в описании самого метода.
Для более наглядной работы библиотеки я реализовал небольшую программку, которая следит когда пользователь зашел в ВК, а когда из него вышел (слабо верится, но может будет кому интересна). Код программы ниже и на GitHub.
Пример программы с использованием библиотеки vkimport datetime
from time import sleep
import vk
def get_status(current_status, vk_api, id):
profiles = vk_api.users.get(user_id=id, fields='online, last_seen')
if (not current_status) and (profiles[0]['online']): # если появился в сети, то выводим время
now = datetime.datetime.now()
print('~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~')
print('Появился в сети в: ', now. strftime("%d-%m-%Y %H:%M"))
return True
if (current_status) and (not profiles[0]['online']): # если был онлайн, но уже вышел, то выводим время выхода
print('Вышел из сети: ', datetime.datetime.fromtimestamp(profiles[0]['last_seen']['time']).strftime('%d-%m-%Y %H:%M'))
print('~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~')
return False
return current_status
if __name__ == '__main__':
id = input("ID пользователя: ")
session = vk.Session()
vk_api = vk.API(session)
current_status = False
while(True):
current_status = get_status(current_status, vk_api, id)
sleep(60) strftime("%d-%m-%Y %H:%M"))
return True
if (current_status) and (not profiles[0]['online']): # если был онлайн, но уже вышел, то выводим время выхода
print('Вышел из сети: ', datetime.datetime.fromtimestamp(profiles[0]['last_seen']['time']).strftime('%d-%m-%Y %H:%M'))
print('~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~')
return False
return current_status
if __name__ == '__main__':
id = input("ID пользователя: ")
session = vk.Session()
vk_api = vk.API(session)
current_status = False
while(True):
current_status = get_status(current_status, vk_api, id)
sleep(60)
strftime("%d-%m-%Y %H:%M"))
return True
if (current_status) and (not profiles[0]['online']): # если был онлайн, но уже вышел, то выводим время выхода
print('Вышел из сети: ', datetime.datetime.fromtimestamp(profiles[0]['last_seen']['time']).strftime('%d-%m-%Y %H:%M'))
print('~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~')
return False
return current_status
if __name__ == '__main__':
id = input("ID пользователя: ")
session = vk.Session()
vk_api = vk.API(session)
current_status = False
while(True):
current_status = get_status(current_status, vk_api, id)
sleep(60)Данная статья предназначалась лишь для понимания основ работы с VK API на Python с использованием библиотеки VK.
Всем добра!
Как установить приложение на Apple Watch? Установка и как закрыть приложение на iWatch?
Apple Watch – это девайс, обладающий высокой функциональностью и современной системой. Но для того, чтобы полноценно пользоваться всеми встроенными функциями часов, необходимо во всем разобраться.
Действия с программами
Установка программ на Apple Wacht
Разработчики предлагают владельцам Apple Watch множество приложений на самые разные случаи жизни: погода, новости, будильник, музыка, соц.сети и другие.
Вы не сможете с помощью «Умных часов» заходить в App Store и устанавливать приложения. Для этого вам необходимо будет синхронизироваться с iPhone.
- Загрузите программу Apple Watch.
- Зайдите в нее и найдите ваши часы.
- После синхронизации вам будет предложено установить на часы все доступные программы с вашего телефона.
- Чтобы добавлять новые программы на Apple Watch, их нужно скачать на iPhone перед установкой.
- Если вы выберете параметр «Автоустановка программ», вам не нужно будет добавлять каждую новую программу самостоятельно. После загрузки на iPhone она автоматически загрузится на Apple Watch. Это же касается и обновлений.
Как установить (скачать) инстаграм на Apple Watch 3 и ранее выпущенные модели?
Сначала необходимо надавить на колесо Drigital Crown, появиться меню «Домой», через которое следует перейти в App Store. Через «Поиск» или при помощи прокрутки, требуется найти приложение Инстаграм. После чего следует выбрать команду «Получить». В новом диалоговом окне нажмите дважды, чтобы установить приложение. Таким образом, у вас появиться Инстаграм в Apple Watch. Приложение автоматически появиться на вашем смартфоне, после установки программы для iwatch 3 (или ранее выпущенных моделях).
Через «Поиск» или при помощи прокрутки, требуется найти приложение Инстаграм. После чего следует выбрать команду «Получить». В новом диалоговом окне нажмите дважды, чтобы установить приложение. Таким образом, у вас появиться Инстаграм в Apple Watch. Приложение автоматически появиться на вашем смартфоне, после установки программы для iwatch 3 (или ранее выпущенных моделях).
Стоит отметить, что подобным образом можно установить или просто скачать программу вКонтакте (vk) для Apple Watch.
iWatch приложенияКак управлять программами и приложениями на Apple Watch?
Принудительно закрываем программу
Если приложение зависло (что случается крайне редко, но все же иногда случается), его можно принудительно закрыть:
- Зажмите боковую кнопку.
- Вам будет предложено меню опций.
- Зажмите снова боковую кнопку и дождитесь выхода в основное меню.
Как найти и удалить устаревшие приложения в iWatch, которые уже не работают?
Изменяем порядок отображения программ
- Нажмите на Digital Crown, чтобы попасть «Домой».
- Зажмите дисплей, чтобы программы отобразились «сеткой». Это необходимо, потому что в режиме списка программы отображаются в алфавитном порядке.
- Коснитесь значка, пока другие значки не «зашевелятся».
- Перетяните его в нужное место.
- Нажмите снова на колесико.

Это можно сделать и через синхронизированный с часами iPhone:
Понравилась статья? Подпишись на наш телеграм канал. Там новости выходят быстрее!
- Зайдите в приложение «Часы».
- Выберете «Внешний вид».
- Зажмите иконку программы и перетяните в нужное место.
Удаляем софт
При отображении сеткой:
- Находясь на экране «Домой», зажмите нужную иконку программы.
- Через пару секунд появится значок «Х».
- Коснитесь его, тем самым удалив программу.
При отображении списком:
- Смахивайте влево по удаляемой программе.
- Нажимаете на изображение корзины.
Примечание! После такого удаления приложение останется на синхронизированном телефоне.
 Если вы хотите одновременно удалить приложение и с Айфона, зажмите на нем иконку программы до появления «Х». Коснитесь значка, тем самым удалив приложение с обоих устройств.
Если вы хотите одновременно удалить приложение и с Айфона, зажмите на нем иконку программы до появления «Х». Коснитесь значка, тем самым удалив приложение с обоих устройств.Изменяем настройки программы
- Откройте приложение «Часы» на телефоне.
- Зайдите в раздел «Мои часы» и пролистайте вниз, пока не дойдете до списка программ.
- Нажмите на программу, чтобы изменить настройки.
В этом же разделе можно посмотреть данные об использовании хранилища. Для этого в «Моих часах» найдите раздел «Основные» — «Использование».
Несколько хитростей по использованию программ и уведомлений в «умных часах»
Стираем уведомления
Это для тех, кому необходим порядок во всем. Свайпните вниз на экране, тем самым зайдя в меню уведомлений. Надавите посильнее на дисплей, чтобы очистить сразу все уведомления. Если вам нужно убрать лишь одно уведомление, смахните его в бок.
Фото: Удаление одного уведомленияПереходим к последнему активному приложению
«Умные часы» — не многозадачный гаджет, но в нем предусмотрена функция перехода к последнему используемому приложению. Для этого следует дважды нажать на цифровую коронку. Повторяйте это действие, чтобы перемещаться между программами.
Для этого следует дважды нажать на цифровую коронку. Повторяйте это действие, чтобы перемещаться между программами.
Меняем интенсивность вибрации
Для уведомлений можно подобрать разную степень интенсивности вибрации.
- Для этого заходим в Настройки/Settings.
- Выбираем раздел “Sounds & Haptics” и настраиваем степень интенсивности.
Меняем настройки пароля
Конечно, правилами безопасности пренебрегать не стоит. Но зачем постоянно вводить пароль, когда гаджет у тебя на руке? Именно для этих случаев и предусмотрена данная функция.
- Берем iPhone, синхронизированный с часами.
- Находим приложение Watch/Часы.
- Выбираем Unlock with iPhone.
 Как пользоваться приложениями для Apple Watch?» src=»https://www.youtube.com/embed/cz6stZcd_O8?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Как пользоваться приложениями для Apple Watch?» src=»https://www.youtube.com/embed/cz6stZcd_O8?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>Роман Владимиров, эксперт по товарам Apple, менеджер компании pedant.ru. Консультант сайта appleiwatch.name, соавтор статей. Работает с продукцией Apple более 10 лет.
ВК для ПК — Скачать ВК для ПК с Windows
BrowserCam предлагает ВК для ПК (ноутбука) скачать бесплатно. Несмотря на то, что приложение VK разработано и разработано для Android и iOS компанией Vk.com, вы можете легко установить VK на ПК для ноутбука. У нас есть несколько простых инструкций, которые помогут вам без особых усилий загрузить ВКонтакте для ПК на Mac или ноутбук с Windows.
VK — это социальная сеть, очень похожая на Facebook и очень популярная в Европе, особенно среди русскоязычных людей.ВК или ВКонтакте в переводе с русского означает «в контакте». ВКонтакте доступен на многих языках и доступен людям со всего мира.
ВКонтакте доступен на многих языках и доступен людям со всего мира.
VK очень похож на Facebook по функциям и сервисам. Общение и поддержание связи со всеми своими контактами — главный мотив для этой услуги, как и для любого другого социального приложения. Вы можете делиться ссылками, историями, фотографиями и публиковать обновления статуса своим друзьям. ВКонтакте также имеет интерфейс чата, как и Facebook.
Вы можете присоединяться к сообществам, знакомиться с новыми людьми и играть в игры.ВКонтакте позволяет создавать или подписываться на 2 типа сообществ: группы и публичные страницы. Группы обычно предназначены для небольшого круга людей со схожими интересами и позволяют им общаться друг с другом. Публичные страницы в основном предназначены для продвижения брендов и общественных деятелей.
Он имеет почти все функции, которые можно ожидать от полноценной социальной сети. Вы можете лайкать сообщения, комментировать их и делиться чужими сообщениями с друзьями и подписчиками.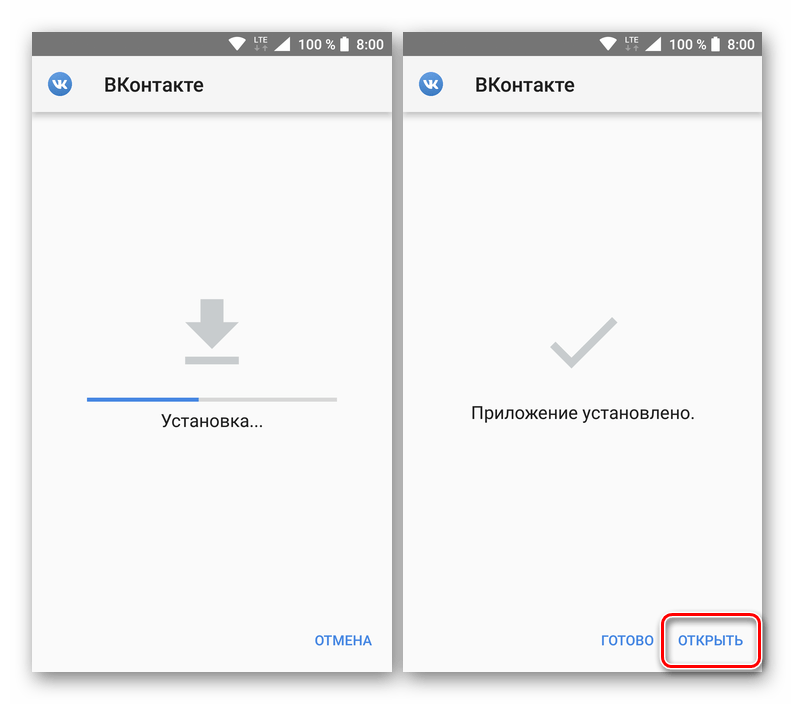 Приложение очень удобное, но при этом имеет очень минималистичный визуальный дизайн.Вы также можете слушать музыку и смотреть видео в приложении.
Приложение очень удобное, но при этом имеет очень минималистичный визуальный дизайн.Вы также можете слушать музыку и смотреть видео в приложении.
База пользователей ВКонтакте за последние несколько лет стремительно растет. Он начинался как закрытая бета-версия, но через несколько лет быстро собрал преданных поклонников. ВКонтакте можно смело считать 2-й лучшей социальной сетью. Пользовательский интерфейс великолепен, и приложения кажутся очень отзывчивыми даже на планшетах. Он все еще находится в активной разработке, и довольно часто появляются новые функции.
Как установить ВК на ПК:
1.Загрузите BlueStacks для ПК, нажав кнопку загрузки на этом сайте.
2. Начните установку проигрывателя приложений BlueStacks, открыв программу установки после завершения загрузки.
3. Прочтите первые два шага и затем нажмите «Далее», чтобы начать следующий шаг в установке.
4. Когда вы увидите «Установить» на экране монитора, просто щелкните по нему, чтобы начать окончательный процесс установки, а затем нажмите «Готово» сразу после его завершения.
5. Запустите проигрыватель приложений BlueStacks через меню «Пуск» Windows или ярлык на рабочем столе.
6. Перед установкой ВКонтакте для ПК вам необходимо связать BlueStacks App Player с учетной записью Google.
7. Наконец, вы попадете в приложение Google Play Store, которое позволяет вам найти приложение ВКонтакте, а затем установить ВКонтакте для ПК или компьютера.
Когда вы, наконец, установили эмулятор Android, вы даже можете использовать файл APK для установки VK для ПК, просто щелкнув apk или запустив его через эмулятор BlueStacks. Если вы хотите использовать Android-эмулятор Andy вместо BlueStacks или планируете бесплатно загрузить ВКонтакте для MAC, вы все равно можете выполнить описанные выше действия.
500 — ВНУТРЕННЯЯ ОШИБКА СЕРВЕРА
Существует несколько распространенных причин этого кода ошибки, включая проблемы с отдельным сценарием, который может быть выполнен по запросу. Некоторые из них легче обнаружить и исправить, чем другие.
Сервер, на котором вы находитесь, в большинстве случаев запускает приложения очень специфическим образом. Сервер обычно ожидает, что файлы и каталоги будут принадлежать вашему конкретному пользователю , пользователю cPanel .Если вы самостоятельно внесли изменения в право собственности на файл через SSH, пожалуйста, сбросьте владельца и группу соответствующим образом.
Разрешения для файлов и каталоговСервер, на котором вы находитесь, в большинстве случаев запускает приложения очень специфическим образом. Сервер обычно ожидает, что файлы, такие как HTML, изображения и другие носители, будут иметь режим разрешений 644 . Сервер также ожидает, что режим разрешений для каталогов в большинстве случаев будет установлен на 755 .
(См. Раздел «Общие сведения о разрешениях файловой системы».)
Ошибки синтаксиса команд в файле . htaccess
htaccess В файле .htaccess вы могли добавить строки, которые конфликтуют друг с другом или являются недопустимыми.
Если вы хотите проверить конкретное правило в вашем файле .htaccess, вы можете прокомментировать эту конкретную строку в .htaccess, добавив # в начало строки. Вы всегда должны делать резервную копию этого файла, прежде чем начинать вносить изменения.
Например, если .htaccess выглядит как
DirectoryIndex default.html
Приложение AddType / x-httpd-php5 php
Тогда попробуйте что-нибудь вроде этого
DirectoryIndex default.html
#AddType application / x-httpd-php5 php
Примечание: Из-за способа настройки серверной среды вы не можете использовать аргументы php_value в файле .htaccess.
Превышены ограничения процесса Возможно, эта ошибка вызвана наличием слишком большого количества процессов в очереди сервера для вашей индивидуальной учетной записи. Каждая учетная запись на нашем сервере может иметь только 25 одновременных активных процессов в любой момент времени, независимо от того, связаны ли они с вашим сайтом или другими процессами, принадлежащими вашему пользователю, такими как почта.
Каждая учетная запись на нашем сервере может иметь только 25 одновременных активных процессов в любой момент времени, независимо от того, связаны ли они с вашим сайтом или другими процессами, принадлежащими вашему пользователю, такими как почта.
пс искусственный
Или введите это, чтобы просмотреть учетную запись конкретного пользователя (не забудьте заменить имя пользователя фактическим именем пользователя):
ps faux | grep имя пользователя
После получения идентификатора процесса («pid») введите его, чтобы убить конкретный процесс (не забудьте заменить pid на фактический идентификатор процесса):
убить pid
Ваш веб-хостинг сможет посоветовать вам, как избежать этой ошибки, если она вызвана ограничениями процесса.Please contact your web host. Be sure to include the steps needed to see the 500 error on your site.
install ros numpy delete (). As of Slicer 3. After install ROS Kinetic, cannot import OpenCV «`python import socketio import eventlet import numpy as np from flask import Flask from keras. ROS安装问题: “Command ‘roscore‘ not found, but can be installed with: sudo apt install python-roslaunch“,代码先锋网,一个为软件开发程序员提供代码片段和技术文章聚合的网站。 Install python dependencies.apt update, apt upgradeに関する説明は こちら の解説が参考になります。. org. Step #4a: pip install OpenCV 4. ROS to Numpy levi-armstrong/ppa sudo apt-get update && sudo apt-get install qt59creator sudo apt-get install qt57creator-plugin-ros Get information about ROS topics: sudo port install py27-numpy py27-matplotlib py27-scipy 3. Install SoftGym (Ubuntu 16. ( #14) Contributors: Alessandro Bottero, Andreas Greimel, Brian Fjeldstad, Eric Wieser, Jon Binney, Jonathan Binney, Martin Idel, Mikael Arguedas, Vincent Rabaud, William Woodall.Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2.
As of Slicer 3. After install ROS Kinetic, cannot import OpenCV «`python import socketio import eventlet import numpy as np from flask import Flask from keras. ROS安装问题: “Command ‘roscore‘ not found, but can be installed with: sudo apt install python-roslaunch“,代码先锋网,一个为软件开发程序员提供代码片段和技术文章聚合的网站。 Install python dependencies.apt update, apt upgradeに関する説明は こちら の解説が参考になります。. org. Step #4a: pip install OpenCV 4. ROS to Numpy levi-armstrong/ppa sudo apt-get update && sudo apt-get install qt59creator sudo apt-get install qt57creator-plugin-ros Get information about ROS topics: sudo port install py27-numpy py27-matplotlib py27-scipy 3. Install SoftGym (Ubuntu 16. ( #14) Contributors: Alessandro Bottero, Andreas Greimel, Brian Fjeldstad, Eric Wieser, Jon Binney, Jonathan Binney, Martin Idel, Mikael Arguedas, Vincent Rabaud, William Woodall.Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2.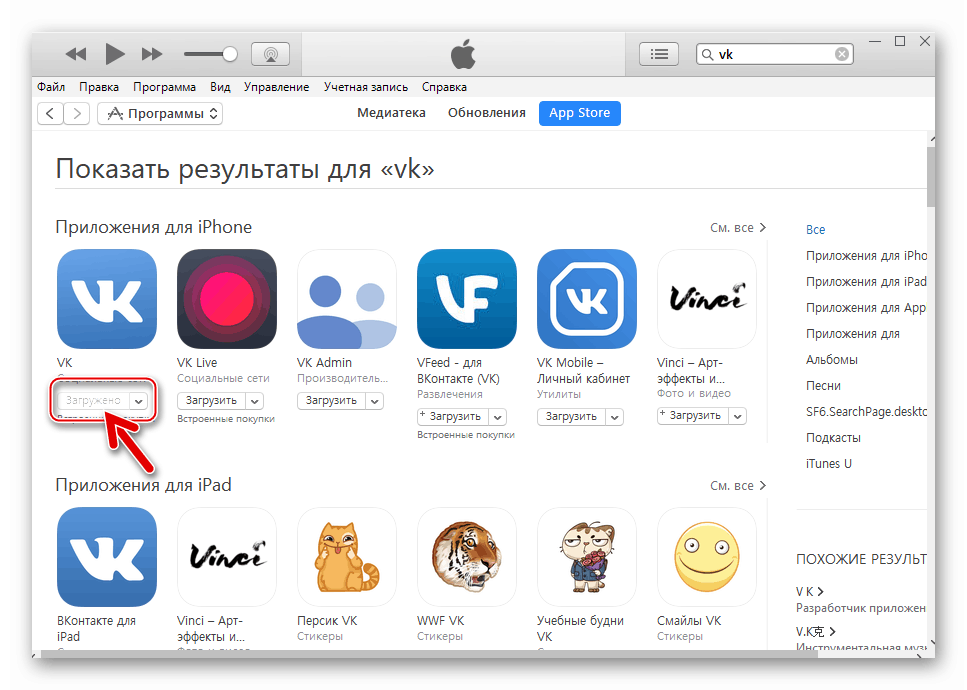 Запустите установщик и установите Qt5. ш. Примечание. По умолчанию boost numpy устанавливает свои библиотеки в ‘/ usr / local / lib64 /’. Последние установщики python3 для Windows устанавливают pip3 автоматически, но убедитесь, что вы установили флажок «Добавить Python 3. Входной массив. мусорное ведро. 5 $ sudo -H pip3 install numpy == 1. В этом руководстве мы расскажем, как установить opencv с anaconda в Windows 10 для новичков в opencv.БеседкаСхемаTurtlebotLidar-v0. sudo apt-get install bzip2, затем следуйте предложенной Хейдом процедуре. deb sudo apt-get update sudo apt-get install Поскольку мы уже используем Python для написания кода для ROS, мы также будем использовать его в домашних заданиях, чтобы вы могли повторно использовать код домашнего задания для лабораторий и наоборот . 4, выберите Desktop-Full Install. Установить стабильную версию просто (для установки версии Python 3 используйте pip3): $ sudo -H pip install Шаг 2 — Установите Tkinter. Давайте обсудим, как установить Numpy, Scipy3, Matplotlib4 и Statsmodels5.
Запустите установщик и установите Qt5. ш. Примечание. По умолчанию boost numpy устанавливает свои библиотеки в ‘/ usr / local / lib64 /’. Последние установщики python3 для Windows устанавливают pip3 автоматически, но убедитесь, что вы установили флажок «Добавить Python 3. Входной массив. мусорное ведро. 5 $ sudo -H pip3 install numpy == 1. В этом руководстве мы расскажем, как установить opencv с anaconda в Windows 10 для новичков в opencv.БеседкаСхемаTurtlebotLidar-v0. sudo apt-get install bzip2, затем следуйте предложенной Хейдом процедуре. deb sudo apt-get update sudo apt-get install Поскольку мы уже используем Python для написания кода для ROS, мы также будем использовать его в домашних заданиях, чтобы вы могли повторно использовать код домашнего задания для лабораторий и наоборот . 4, выберите Desktop-Full Install. Установить стабильную версию просто (для установки версии Python 3 используйте pip3): $ sudo -H pip install Шаг 2 — Установите Tkinter. Давайте обсудим, как установить Numpy, Scipy3, Matplotlib4 и Statsmodels5. 0-cp27-cp27mu-linux_aarch64. Изображение автора из моделирования ROS. Запустите модель и классифицируйте изображение. conda установить osx-arm64 v2. Скорее всего, если вы работали с ROS, вы знаете, насколько болезненно писать код для декодирования сообщений ROS из записанных файлов пакетов. Затем с его помощью установите следующие пакеты: pip3 install rospkg dataclasses scipy numpy pyqtgraph pyserial. Далее, есть несколько способов запустить этот скрипт:. while (capture Теперь есть несколько разных способов заставить Linux и ROS работать с Raspberry PI.Добавьте этот код и сохраните файл. list и в / etc / apt / sources. В противном случае Python обычно уже является частью установки. Рекомендуем «пип» и «Анаконда». Затем Jetson Nano проведет вас через процесс установки, включая настройку вашего имени пользователя / пароля, часового пояса, раскладки клавиатуры и т. Д. В этом уроке вы узнаете, как использовать датчик движения PIR с Arduino и обеспечить связь Arduino программа Python, запущенная на вашем компьютере, чтобы отправлять электронную почту всякий раз, когда датчик обнаруживает движение.
0-cp27-cp27mu-linux_aarch64. Изображение автора из моделирования ROS. Запустите модель и классифицируйте изображение. conda установить osx-arm64 v2. Скорее всего, если вы работали с ROS, вы знаете, насколько болезненно писать код для декодирования сообщений ROS из записанных файлов пакетов. Затем с его помощью установите следующие пакеты: pip3 install rospkg dataclasses scipy numpy pyqtgraph pyserial. Далее, есть несколько способов запустить этот скрипт:. while (capture Теперь есть несколько разных способов заставить Linux и ROS работать с Raspberry PI.Добавьте этот код и сохраните файл. list и в / etc / apt / sources. В противном случае Python обычно уже является частью установки. Рекомендуем «пип» и «Анаконда». Затем Jetson Nano проведет вас через процесс установки, включая настройку вашего имени пользователя / пароля, часового пояса, раскладки клавиатуры и т. Д. В этом уроке вы узнаете, как использовать датчик движения PIR с Arduino и обеспечить связь Arduino программа Python, запущенная на вашем компьютере, чтобы отправлять электронную почту всякий раз, когда датчик обнаруживает движение. There are only a few tools out there that offer full-fledged functionality to Calculations are carried out with numpy. delete (x, [ 0, 2, 3], axis=0) pythonでOpenCVを使用したいので、まず、OpenCVと依存関係にあるnumpyをインストールしました。numpyはpipでインストールするようですが、まずpipがないのでインストール。 pipはpipとpip3がある。これはpython2、python3が同環境にある場合にそれぞれで依存環境を分けることができる。python3だけならpipだけ ROS运行python脚本报错ImportError: No module named srv. PyTorch is a popular Deep Learning framework. The elements of the shape tuple give the lengths of the corresponding array dimensions.Установите Scikit-Image. OpenCV не является пакетом Python, но включает привязки Python (известные как opencv-python в pip). Если вы устанавливаете OpenCV на Jetson Nano или на Jetson TX2 / AGX Xavier с JetPack-4. 4, но руководства по установке PyTorch обычно по умолчанию устанавливают последнюю версию. 16, в настоящее время доступна. Преобразуйте данные из uint8 в float64. html 4/14 Ve c t or s MATLAB / Octave Python Description Я начал по пути, предложенному @HimnashuTanwar, создавая мелодию из исходного кода, но в конечном итоге пришел к выводу, что полная установка мелодии ros не жизнеспособна в 20.
There are only a few tools out there that offer full-fledged functionality to Calculations are carried out with numpy. delete (x, [ 0, 2, 3], axis=0) pythonでOpenCVを使用したいので、まず、OpenCVと依存関係にあるnumpyをインストールしました。numpyはpipでインストールするようですが、まずpipがないのでインストール。 pipはpipとpip3がある。これはpython2、python3が同環境にある場合にそれぞれで依存環境を分けることができる。python3だけならpipだけ ROS运行python脚本报错ImportError: No module named srv. PyTorch is a popular Deep Learning framework. The elements of the shape tuple give the lengths of the corresponding array dimensions.Установите Scikit-Image. OpenCV не является пакетом Python, но включает привязки Python (известные как opencv-python в pip). Если вы устанавливаете OpenCV на Jetson Nano или на Jetson TX2 / AGX Xavier с JetPack-4. 4, но руководства по установке PyTorch обычно по умолчанию устанавливают последнюю версию. 16, в настоящее время доступна. Преобразуйте данные из uint8 в float64. html 4/14 Ve c t or s MATLAB / Octave Python Description Я начал по пути, предложенному @HimnashuTanwar, создавая мелодию из исходного кода, но в конечном итоге пришел к выводу, что полная установка мелодии ros не жизнеспособна в 20.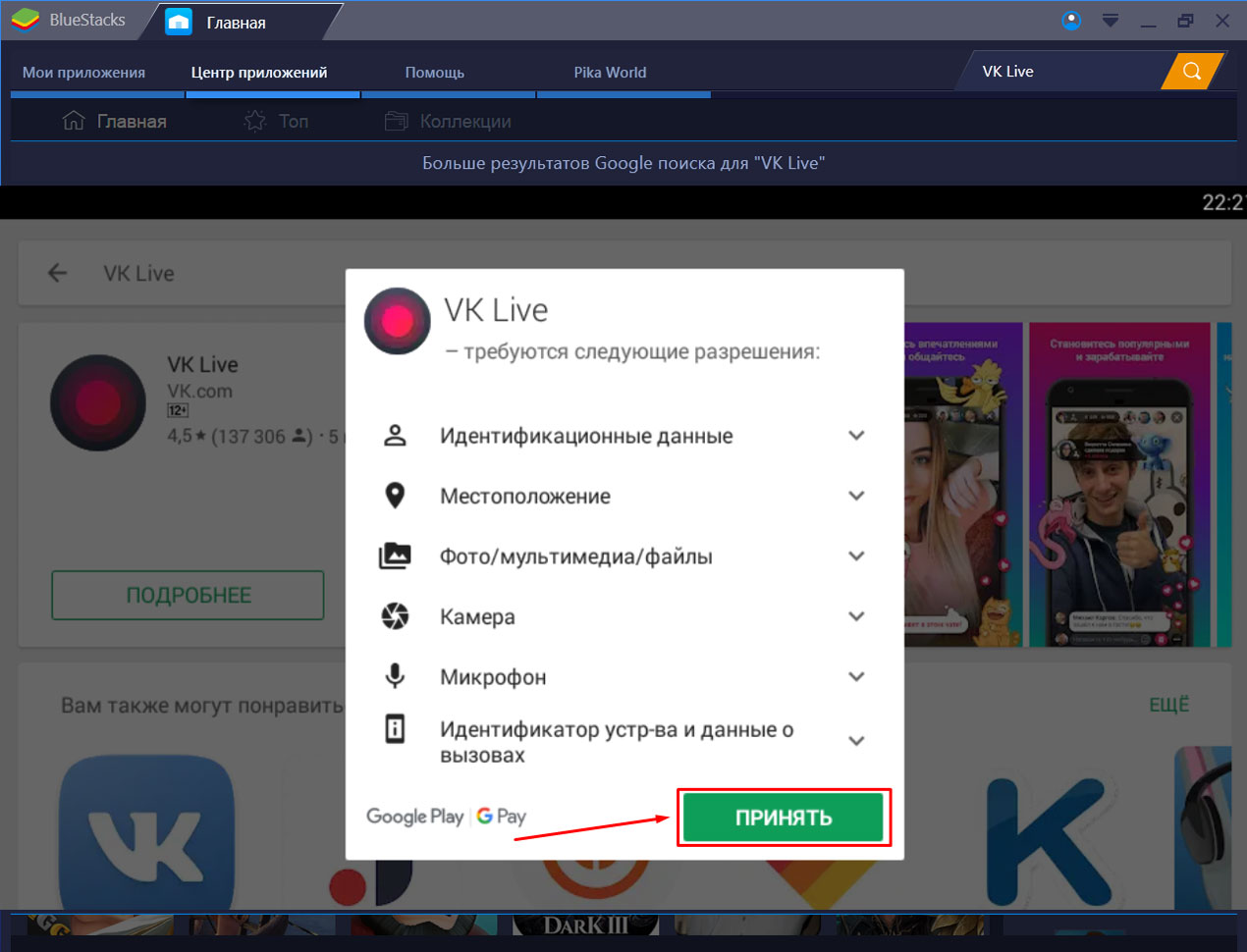 VideoWriter (‘output_video. Нам нужно установить целую кучу вещей, включая плагин дифференциального привода, который позволит нам управлять скоростью нашего робота с помощью команд ROS 2. Это руководство поможет вам установить CUDA, OpenCV, ROS, PCL , Установка пакетов Realsense Установите Ubuntu [swap = 2xRAM, назначьте отдых (root)] [в случае двойной загрузки по боковым окнам не забудьте включить безопасную загрузку и быструю загрузку] Чтобы система оставалась организованной, создайте папку «рабочее пространство» для других рабочих пространств ROS… Настройка CUDA — ROS — OpenCV — PCL — Gazebo, и я следую этим инструкциям и пытаюсь установить пару библиотек python, как указано, с помощью следующей команды: python -m pip install — Криптография catkin_pkg empy ifcfg lark-parser lxml netifaces numpy opencv-python pyparsing pyyaml setuptools Расчеты выполняются с помощью numpy.14. Reading ROS Messages from a Bagfile in Python. parameter is fps, 4. That axis has 3 elements in it, so we say it has a For this class, we recommend natively installing Python 3.
VideoWriter (‘output_video. Нам нужно установить целую кучу вещей, включая плагин дифференциального привода, который позволит нам управлять скоростью нашего робота с помощью команд ROS 2. Это руководство поможет вам установить CUDA, OpenCV, ROS, PCL , Установка пакетов Realsense Установите Ubuntu [swap = 2xRAM, назначьте отдых (root)] [в случае двойной загрузки по боковым окнам не забудьте включить безопасную загрузку и быструю загрузку] Чтобы система оставалась организованной, создайте папку «рабочее пространство» для других рабочих пространств ROS… Настройка CUDA — ROS — OpenCV — PCL — Gazebo, и я следую этим инструкциям и пытаюсь установить пару библиотек python, как указано, с помощью следующей команды: python -m pip install — Криптография catkin_pkg empy ifcfg lark-parser lxml netifaces numpy opencv-python pyparsing pyyaml setuptools Расчеты выполняются с помощью numpy.14. Reading ROS Messages from a Bagfile in Python. parameter is fps, 4. That axis has 3 elements in it, so we say it has a For this class, we recommend natively installing Python 3. Vector, point, quaternion, and matrix function arguments are expected to be “array like”, i. For example, sudo apt-get install python3-pip python3-all-dev python3-yaml python3-rospkg sudo apt-get install ros-melodic-desktop-full —fix-missing sudo pip3 install rospkg catkin_pkg この記事では「 【NumPy初心者必見】NumPyのインストール方法まとめました! 」といった内容について、誰でも理解できるように解説します。この記事を読めば、あなたの悩みが解決するだけじゃなく、新たな気付きも発見できることでしょう。お悩みの方はぜひご一読ください。 This blog explains installation procedure for Dex-Net on a system installed with Anaconda and ROS.sudo apt-get install python-catkin-tools python3-dev python3-numpy. imwrite () сохраняет изображение в файл. Похоже, Numpy обновился. Установите ROS Kinetic Kame (Ubuntu 16. numpy. * FromTranslationRotation (перевод, вращение) -> matrix.
Vector, point, quaternion, and matrix function arguments are expected to be “array like”, i. For example, sudo apt-get install python3-pip python3-all-dev python3-yaml python3-rospkg sudo apt-get install ros-melodic-desktop-full —fix-missing sudo pip3 install rospkg catkin_pkg この記事では「 【NumPy初心者必見】NumPyのインストール方法まとめました! 」といった内容について、誰でも理解できるように解説します。この記事を読めば、あなたの悩みが解決するだけじゃなく、新たな気付きも発見できることでしょう。お悩みの方はぜひご一読ください。 This blog explains installation procedure for Dex-Net on a system installed with Anaconda and ROS.sudo apt-get install python-catkin-tools python3-dev python3-numpy. imwrite () сохраняет изображение в файл. Похоже, Numpy обновился. Установите ROS Kinetic Kame (Ubuntu 16. numpy. * FromTranslationRotation (перевод, вращение) -> matrix. 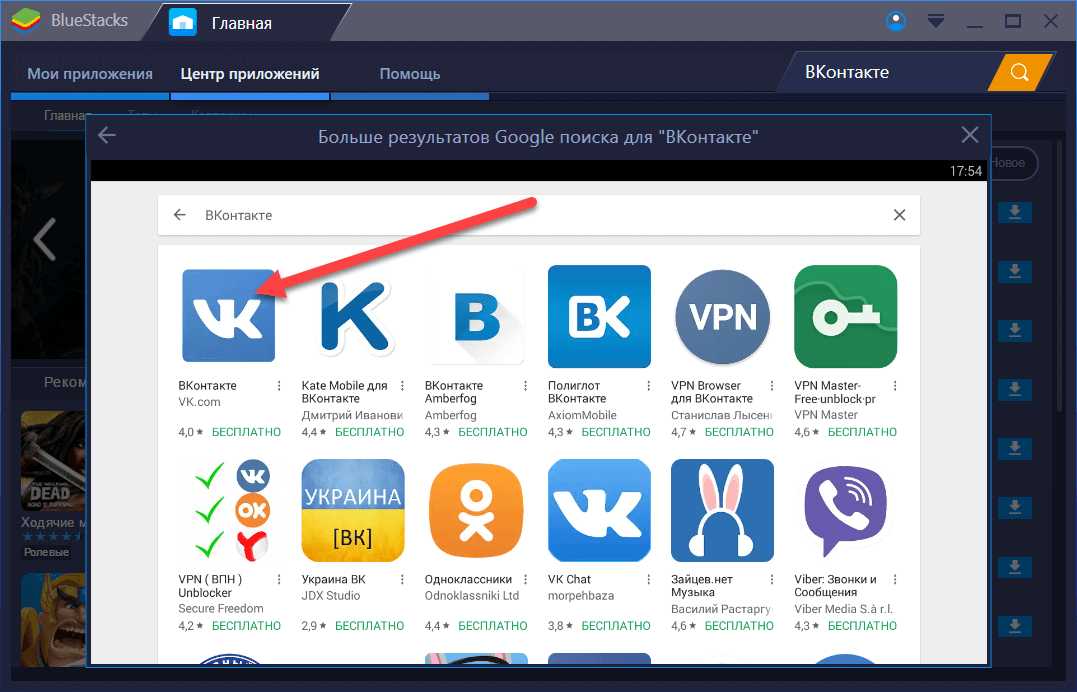 sudo apt update sudo apt upgrade. ros-melodic-vision-opencv; ros-melodic-image-transport-plugins; ros-melodic-cmake-modules Из-за зависимостей ROS Melodic (в основном графических / связанных с libgtk-3-dev) пришлось компилировать отдельно, v2. scipy и matplotlib не включены из-за сложности компиляции их двоичных файлов для распространения. После этого отобразится сообщение об успешной установке. Шаг-6. png: ROS: более сложный лабиринт с контрастными цветами между полом и стенами.Здесь вы узнаете, как отображать и сохранять изображения и видео, управлять событиями мыши и создавать трекбары. Чтобы установить порт: cd / usr / ports / math / py-numpy / && make install clean. / установка-омпл-убунту. сумка. Пользователи Windows могут установить с помощью setuptools. Эта команда начнет загрузку и установку пакетов, связанных с библиотекой Tkinter. 2 ROS — Операционная система роботов. Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2.
sudo apt update sudo apt upgrade. ros-melodic-vision-opencv; ros-melodic-image-transport-plugins; ros-melodic-cmake-modules Из-за зависимостей ROS Melodic (в основном графических / связанных с libgtk-3-dev) пришлось компилировать отдельно, v2. scipy и matplotlib не включены из-за сложности компиляции их двоичных файлов для распространения. После этого отобразится сообщение об успешной установке. Шаг-6. png: ROS: более сложный лабиринт с контрастными цветами между полом и стенами.Здесь вы узнаете, как отображать и сохранять изображения и видео, управлять событиями мыши и создавать трекбары. Чтобы установить порт: cd / usr / ports / math / py-numpy / && make install clean. / установка-омпл-убунту. сумка. Пользователи Windows могут установить с помощью setuptools. Эта команда начнет загрузку и установку пакетов, связанных с библиотекой Tkinter. 2 ROS — Операционная система роботов. Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2. После этого мы установим PyGame в Jetson Nano, собрав из источника: $ sudo apt install libsdl1.0) на Jetson TX2. При установке флажка добавляется сообщение. Если вы устанавливаете OpenRAVE, весьма вероятно, что вы уже установили ROS Indigo. 63 из источника. Цветок: дружественная федеративная система обучения. используя ‘pip install numpy == 1. параметр — размер кадра видео. Если вы никогда раньше не устанавливали другой пакет ROS, вам необходимо создать рабочую область catkin и настроить оболочку: Установите Visual Studio 2019. Шаг 2: Щелкните вкладку «Среда», а затем нажмите кнопку «Создать», чтобы создать новую среду Pandas.Это может стать трудным и занять много времени для новичка, но это полезно при создании настраиваемой установки ROS. Машинопись. Примечание: выпуск с исправлением ошибок, 2. x 1. Загрузите сценарий установки OMPL. Среда Linux Python 3 3. Рекомендуется устанавливать Python через Microsoft Store. import numpy Установите Visual Studio 2019. 4 с Xcode 5. Если эта команда приводит к компиляции Matplotlib из источника и возникают проблемы с компиляцией, вы можете добавить —prefer Числовое значение 14.
После этого мы установим PyGame в Jetson Nano, собрав из источника: $ sudo apt install libsdl1.0) на Jetson TX2. При установке флажка добавляется сообщение. Если вы устанавливаете OpenRAVE, весьма вероятно, что вы уже установили ROS Indigo. 63 из источника. Цветок: дружественная федеративная система обучения. используя ‘pip install numpy == 1. параметр — размер кадра видео. Если вы никогда раньше не устанавливали другой пакет ROS, вам необходимо создать рабочую область catkin и настроить оболочку: Установите Visual Studio 2019. Шаг 2: Щелкните вкладку «Среда», а затем нажмите кнопку «Создать», чтобы создать новую среду Pandas.Это может стать трудным и занять много времени для новичка, но это полезно при создании настраиваемой установки ROS. Машинопись. Примечание: выпуск с исправлением ошибок, 2. x 1. Загрузите сценарий установки OMPL. Среда Linux Python 3 3. Рекомендуется устанавливать Python через Microsoft Store. import numpy Установите Visual Studio 2019. 4 с Xcode 5. Если эта команда приводит к компиляции Matplotlib из источника и возникают проблемы с компиляцией, вы можете добавить —prefer Числовое значение 14. sh —python установит последнюю версию OMPL sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools sudo apt-get install ros-indigo-openrave Примечание 1 / 3/2018 NumPy для пользователей MATLAB — Mathesaurus http: // mathesaurus. Люди могут скомпилировать свои собственные версии scipy для установки и использования с локальной копией слайсера. Я только что получил свой Nano и прогнал его. wtf python-gevent python-h5py python-numpy python-pil python-pip python-scipy python-tk # Установить пакеты репо Устанавливать из готовых двоичных файлов, доступных в репозиториях Ubuntu; Скомпилировать из исходников.0 был выпущен 3 июля 2010 года. С технической точки зрения агент — это демон на устройстве (системная служба Linux) и набор программных интерфейсов (ROS, Python, Protobuf и REST), которые обеспечивают безопасную двустороннюю связь и полный анализ вычислительной системы и подключенных датчиков вашего робота. run Я следую этим инструкциям, и при попытке установить пару библиотек python, как он говорит, с помощью следующей команды: python -m pip install -U catkin_pkg криптография empy ifcfg lark-parser lxml netifaces numpy opencv-python pyparsing pyyaml setuptools установленные зависимости (choco install -y -s
sh —python установит последнюю версию OMPL sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools sudo apt-get install ros-indigo-openrave Примечание 1 / 3/2018 NumPy для пользователей MATLAB — Mathesaurus http: // mathesaurus. Люди могут скомпилировать свои собственные версии scipy для установки и использования с локальной копией слайсера. Я только что получил свой Nano и прогнал его. wtf python-gevent python-h5py python-numpy python-pil python-pip python-scipy python-tk # Установить пакеты репо Устанавливать из готовых двоичных файлов, доступных в репозиториях Ubuntu; Скомпилировать из исходников.0 был выпущен 3 июля 2010 года. С технической точки зрения агент — это демон на устройстве (системная служба Linux) и набор программных интерфейсов (ROS, Python, Protobuf и REST), которые обеспечивают безопасную двустороннюю связь и полный анализ вычислительной системы и подключенных датчиков вашего робота. run Я следую этим инструкциям, и при попытке установить пару библиотек python, как он говорит, с помощью следующей команды: python -m pip install -U catkin_pkg криптография empy ifcfg lark-parser lxml netifaces numpy opencv-python pyparsing pyyaml setuptools установленные зависимости (choco install -y -s 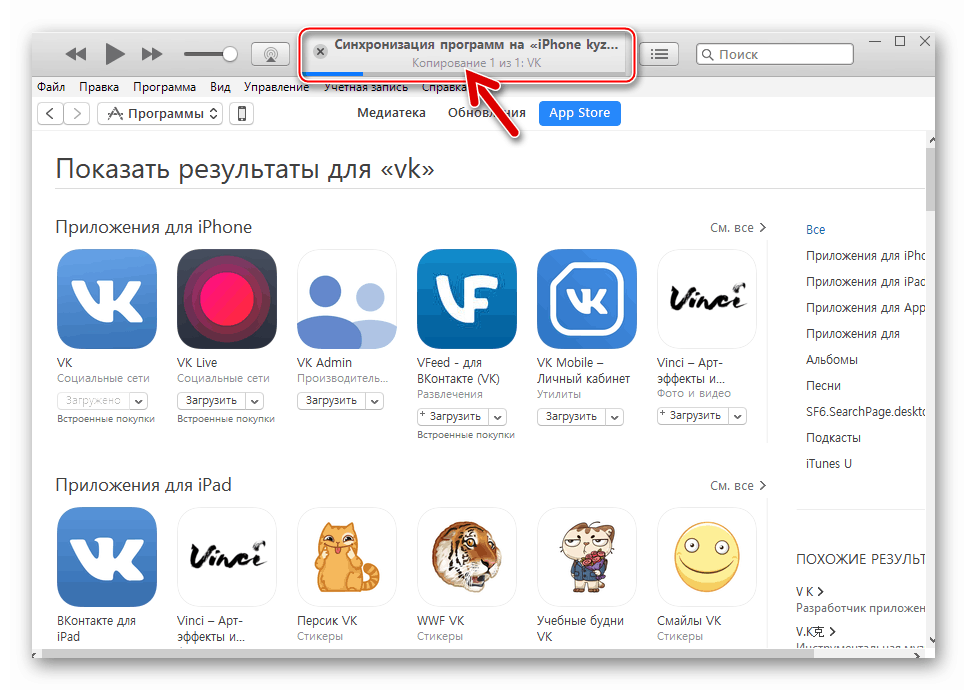 Откройте подсказку Anaconda в меню «Пуск» Windows и cd (смените каталог) в каталог micropython, содержащий файлы. Wiki ROS предназначена для ROS 1. Загрузите 64-разрядный установщик для python 3.. py для pypi не очень полезен для узлов ROS. При выборе компонентов для установки единственное, что вам абсолютно необходимо, это соответствующий 64-битный компонент MSVC в Qt-> Qt 5. Создайте рабочее пространство ros. Это позволяет пользователям устанавливать зависимости для дистрибутива ROS с версией Python, отличной от целевой дистрибутива ROS, например, для пользователей Arch Linux, использующих Python 3 для ROS Melodic.Мы должны активировать его NumPy v1. Содержание 1. 6 -m pip install numpy Команда выше установит numpy для python3. sudo apt install ros-foxy-gazebo-ros-pkgs Установить Numpy Установить драйверы Nvidia Установить Ros Установить изображение Scikit sudo apt install libgazebo7-dev Чтение сообщений ROS из файла Bagfile в Python. 0; Чтобы установить этот пакет с помощью conda, выполните одно из следующих действий: conda install -c conda-forge tensorflow W3Schools предлагает бесплатные онлайн-руководства, справочные материалы и упражнения на всех основных языках Интернета.
Откройте подсказку Anaconda в меню «Пуск» Windows и cd (смените каталог) в каталог micropython, содержащий файлы. Wiki ROS предназначена для ROS 1. Загрузите 64-разрядный установщик для python 3.. py для pypi не очень полезен для узлов ROS. При выборе компонентов для установки единственное, что вам абсолютно необходимо, это соответствующий 64-битный компонент MSVC в Qt-> Qt 5. Создайте рабочее пространство ros. Это позволяет пользователям устанавливать зависимости для дистрибутива ROS с версией Python, отличной от целевой дистрибутива ROS, например, для пользователей Arch Linux, использующих Python 3 для ROS Melodic.Мы должны активировать его NumPy v1. Содержание 1. 6 -m pip install numpy Команда выше установит numpy для python3. sudo apt install ros-foxy-gazebo-ros-pkgs Установить Numpy Установить драйверы Nvidia Установить Ros Установить изображение Scikit sudo apt install libgazebo7-dev Чтение сообщений ROS из файла Bagfile в Python. 0; Чтобы установить этот пакет с помощью conda, выполните одно из следующих действий: conda install -c conda-forge tensorflow W3Schools предлагает бесплатные онлайн-руководства, справочные материалы и упражнения на всех основных языках Интернета.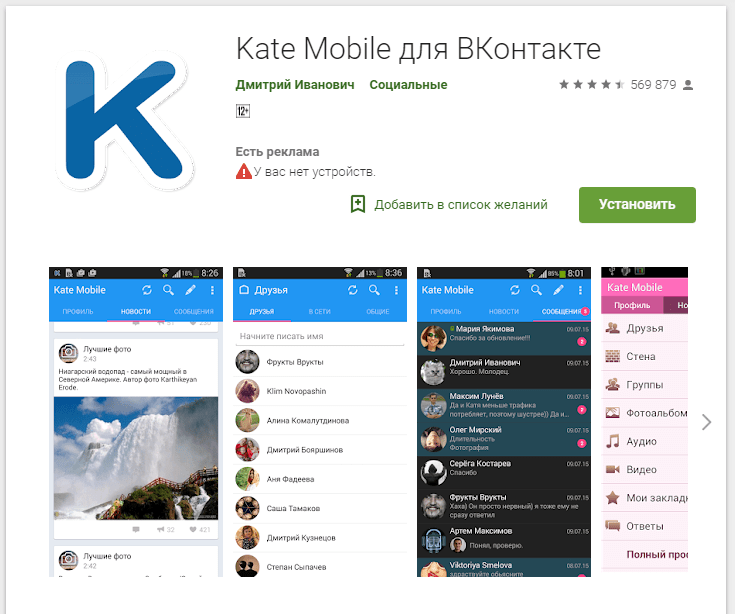 Во многих открытых исходных кодах или документах по-прежнему используется 1. Он достаточно универсален для использования в веб-разработке и дизайне приложений. 04) Добавьте репозиторий ros в источники apt и настройте ключи репозитория EigenPy — эффективные привязки Python между Numpy / Eigen. список. Библиотека OpenCV доступна в официальном репозитории Ubuntu в Ubuntu 20. В этом случае вы можете установить collada-dom-dev напрямую: sudo apt-get update sudo apt-get install collada-dom-dev. CUDA был разработан с учетом нескольких целей дизайна: Предоставить NumPy: по умолчанию в более поздних версиях Python, таких как 3.угловая навигация с помощью компонента. Углы указаны в радианах, если не указано иное. Создайте рабочее пространство ROS и загрузите код 3. Python 3. Цель этого документа — дать обзор специфичного для Windows поведения, о котором вы должны знать при использовании Python в Microsoft Windows. —-> 4 из my_custom_srv_msg_pkg. питон. Мы рекомендуем вам установить его в расположение по умолчанию C: \ Qt, но если вы выберете другое место, обязательно обновите пути ниже соответственно.
Во многих открытых исходных кодах или документах по-прежнему используется 1. Он достаточно универсален для использования в веб-разработке и дизайне приложений. 04) Добавьте репозиторий ros в источники apt и настройте ключи репозитория EigenPy — эффективные привязки Python между Numpy / Eigen. список. Библиотека OpenCV доступна в официальном репозитории Ubuntu в Ubuntu 20. В этом случае вы можете установить collada-dom-dev напрямую: sudo apt-get update sudo apt-get install collada-dom-dev. CUDA был разработан с учетом нескольких целей дизайна: Предоставить NumPy: по умолчанию в более поздних версиях Python, таких как 3.угловая навигация с помощью компонента. Углы указаны в радианах, если не указано иное. Создайте рабочее пространство ROS и загрузите код 3. Python 3. Цель этого документа — дать обзор специфичного для Windows поведения, о котором вы должны знать при использовании Python в Microsoft Windows. —-> 4 из my_custom_srv_msg_pkg. питон. Мы рекомендуем вам установить его в расположение по умолчанию C: \ Qt, но если вы выберете другое место, обязательно обновите пути ниже соответственно. 0 документации. 04. Рахул Бхадани.04, 20. Откройте терминал и введите: $ pip install jupyter. соотв. 0-dev libsdl1. numpy ‘(неизвестное местоположение) Похоже, установка pandas не завершена. Достойная интеграция VSCode с ROS. 1. 10 пока нет. Tkinter можно установить с помощью pip. 1` исправляет проблему с будущим предупреждением. sudo apt install ros-kinetic-ros-numpy import ros_numpy def callback_pcl (pc2_msg): xyz_array = ros_numpy. Установка OpenCV-Python из предварительно созданных двоичных файлов: установите все пакеты с помощью следующей команды в терминале от имени пользователя root.Установите базовые пакеты Python3 и некоторые зависимости ROS (их может быть больше в зависимости от каждого пакета ROS) « $ sudo apt-get install python-catkin-tools python3-dev python3-numpy $ pip install pyaml $ pip install rospkg $ pip install numpy $ pip install empy $ pip install cffi « `### 2. Если у вас нет или вы не хотите удалить Anaconda и работать с Dexnet, вы можете выполнить процедуру установки, как описано в документации по автоматизации Berkeley.
0 документации. 04. Рахул Бхадани.04, 20. Откройте терминал и введите: $ pip install jupyter. соотв. 0-dev libsdl1. numpy ‘(неизвестное местоположение) Похоже, установка pandas не завершена. Достойная интеграция VSCode с ROS. 1. 10 пока нет. Tkinter можно установить с помощью pip. 1` исправляет проблему с будущим предупреждением. sudo apt install ros-kinetic-ros-numpy import ros_numpy def callback_pcl (pc2_msg): xyz_array = ros_numpy. Установка OpenCV-Python из предварительно созданных двоичных файлов: установите все пакеты с помощью следующей команды в терминале от имени пользователя root.Установите базовые пакеты Python3 и некоторые зависимости ROS (их может быть больше в зависимости от каждого пакета ROS) « $ sudo apt-get install python-catkin-tools python3-dev python3-numpy $ pip install pyaml $ pip install rospkg $ pip install numpy $ pip install empy $ pip install cffi « `### 2. Если у вас нет или вы не хотите удалить Anaconda и работать с Dexnet, вы можете выполнить процедуру установки, как описано в документации по автоматизации Berkeley.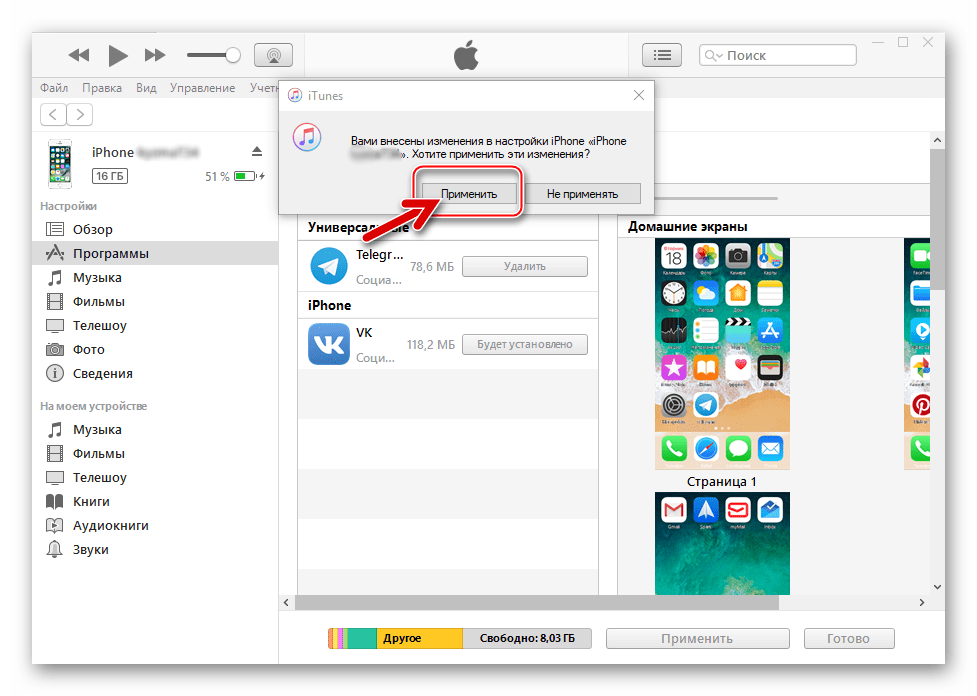 NumPy — это библиотека Python с открытым исходным кодом, которая позволяет эффективно управлять многомерными объектами. Большинство двоичных файлов построено из исходного кода, найденного в PyPI или в общедоступном контроле версий проектов. Установите numpy + mkl перед другими пакетами, которые зависят от него.Introduction to OpenCV. have Numpy, Scipy3, Matplotlib4, and Statsmodels5 installed. Jason Knight in The Startup. # Python 2. Improved use of numpy. The initial guess can also be provided by the ‘2D Pose Estimate’ Tool in RVIZ. 2019-11-21 Update: Readers have reported that some versions of OpenCV 4 as installed via pip do not work properly on the Raspberry Pi. Run the installer and install Qt5. 21 # install h5py with Cython version 0. というわけで、どのやり方が自分にあっているのかを考察するため、主に速度・構築の難易度に関して実験して確認 Prerequisites.Единый подход к федеративному обучению. «Фреймворки» HTML / CSS — памятники невежеству, некомпетентности и некомпетентности. Зависимости: numpy, scipy, pyquaternion, zoom_kurokesu, pykdl.
NumPy — это библиотека Python с открытым исходным кодом, которая позволяет эффективно управлять многомерными объектами. Большинство двоичных файлов построено из исходного кода, найденного в PyPI или в общедоступном контроле версий проектов. Установите numpy + mkl перед другими пакетами, которые зависят от него.Introduction to OpenCV. have Numpy, Scipy3, Matplotlib4, and Statsmodels5 installed. Jason Knight in The Startup. # Python 2. Improved use of numpy. The initial guess can also be provided by the ‘2D Pose Estimate’ Tool in RVIZ. 2019-11-21 Update: Readers have reported that some versions of OpenCV 4 as installed via pip do not work properly on the Raspberry Pi. Run the installer and install Qt5. 21 # install h5py with Cython version 0. というわけで、どのやり方が自分にあっているのかを考察するため、主に速度・構築の難易度に関して実験して確認 Prerequisites.Единый подход к федеративному обучению. «Фреймворки» HTML / CSS — памятники невежеству, некомпетентности и некомпетентности. Зависимости: numpy, scipy, pyquaternion, zoom_kurokesu, pykdl. форма (а) [источник] ¶. 1 Установите Kalibr Установите зависимость. 21 (± 6 мин при 1950 МГц) $ sudo -H pip3 install h5py == 2. Установите его с помощью pip: python -m pip install -U pip python -m pip install -U matplotlib. установить машинописный текст с помощью npm. Если вы никогда раньше не устанавливали другой пакет ROS, вам необходимо создать рабочее пространство catkin и настроить оболочку: всего вышеперечисленного достаточно для пакетов ROS, которые не вызывают внешние библиотеки Python.Теперь есть несколько разных способов заставить Linux и ROS работать с Raspberry PI. Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2: EigenPy — эффективные привязки Python между Numpy / Eigen. py Traj_data2. git cd ros_numpy / настройка python. Мы также рекомендуем установить сборку catkin_ tools, чтобы упростить сборку ROS. 15. Python 2. Установка всех пакетов и библиотек. Затем вы можете установить Numpy или Scipy как обычный пакет Termux: pkg install numpy pkg install scipy OpenCV.
форма (а) [источник] ¶. 1 Установите Kalibr Установите зависимость. 21 (± 6 мин при 1950 МГц) $ sudo -H pip3 install h5py == 2. Установите его с помощью pip: python -m pip install -U pip python -m pip install -U matplotlib. установить машинописный текст с помощью npm. Если вы никогда раньше не устанавливали другой пакет ROS, вам необходимо создать рабочее пространство catkin и настроить оболочку: всего вышеперечисленного достаточно для пакетов ROS, которые не вызывают внешние библиотеки Python.Теперь есть несколько разных способов заставить Linux и ROS работать с Raspberry PI. Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2: EigenPy — эффективные привязки Python между Numpy / Eigen. py Traj_data2. git cd ros_numpy / настройка python. Мы также рекомендуем установить сборку catkin_ tools, чтобы упростить сборку ROS. 15. Python 2. Установка всех пакетов и библиотек. Затем вы можете установить Numpy или Scipy как обычный пакет Termux: pkg install numpy pkg install scipy OpenCV. EigenPy обеспечивает: — полное разделение памяти между Numpy и Eigen без выделения памяти — полную поддержку Eigen :: Ref без выделения памяти — описание модуля Geometry Eigen для простого прототипирования кода — стандартная матрица Просто установите ros- [distribution] -lanelet2, e . bashrc) export ROS_PACKAGE_PATH = ~ / workspace Загрузите конфигурацию Nengoros: ROS — это мета-операционная система с открытым исходным кодом для вашего робота. 7. Установите Ros. Установите Scikit Image. Установите инструменты установки. Установите NumPy. 4 Скомпилируйте и установите cv_bridge5.Installing Numpy, SciPy, OpenCV, Theano for Python in VS. Parameters. py file. imread ( ‘your_image. ubuntu18에는 기본 PCL 포함 -> apt-get install libpcl-dev만 하면 됨 -> python-pcl설치 ROS 설치시 PCL — V1. Python’s elegant syntax and dynamic typing, together with its interpreted nature, make it an ideal language for scripting and rapid application development in Numpy. Microsoft Azure provides hosted access to Jupyter Notebooks.
EigenPy обеспечивает: — полное разделение памяти между Numpy и Eigen без выделения памяти — полную поддержку Eigen :: Ref без выделения памяти — описание модуля Geometry Eigen для простого прототипирования кода — стандартная матрица Просто установите ros- [distribution] -lanelet2, e . bashrc) export ROS_PACKAGE_PATH = ~ / workspace Загрузите конфигурацию Nengoros: ROS — это мета-операционная система с открытым исходным кодом для вашего робота. 7. Установите Ros. Установите Scikit Image. Установите инструменты установки. Установите NumPy. 4 Скомпилируйте и установите cv_bridge5.Installing Numpy, SciPy, OpenCV, Theano for Python in VS. Parameters. py file. imread ( ‘your_image. ubuntu18에는 기본 PCL 포함 -> apt-get install libpcl-dev만 하면 됨 -> python-pcl설치 ROS 설치시 PCL — V1. Python’s elegant syntax and dynamic typing, together with its interpreted nature, make it an ideal language for scripting and rapid application development in Numpy. Microsoft Azure provides hosted access to Jupyter Notebooks. Here, we will look at the Numpy. NumPy 数组属性 本章节我们将来了解 NumPy 数组的一些基本属性。 NumPy 数组的维数称为秩(rank),秩就是轴的数量,即数组的维度,一维数组的秩为 1,二维数组的秩为 2,以此类推。 在 NumPy中,每一个线性的数组称为是一个轴(axis),也就是维度(dimensions)。 Install Ros Install Scikit Image Install Setuptools Install NumPy.Он интегрирован с Keras, библиотекой нейронной сети, написанной на Python. Вернуть форму массива. conda установить numpy. 7 o Выполнить команду: sudo pip install enum34 Примечание. Некоторые из пакетов в этом разделе уже включены в Python3; подробности см. В том месте, где был получен Python 3. sh установит последнюю версию OMPL без привязок Python. Чтобы установить TensorFlow в операционной системе Windows, выполните следующие действия. Для пользователей: см. Этот ответ ROS для получения подробной информации о том, как индексировать в облаке точек.Теперь см. Полный список на носителе. Если эта команда приводит к компиляции Matplotlib из исходного кода и возникают проблемы с компиляцией, вы можете добавить —prefer Installation guide¶. Наслаждайтесь! Процесс настройки EigenPy — это фреймворк с открытым исходным кодом, который позволяет связать знаменитую библиотеку Eigen C ++ с Python.
Here, we will look at the Numpy. NumPy 数组属性 本章节我们将来了解 NumPy 数组的一些基本属性。 NumPy 数组的维数称为秩(rank),秩就是轴的数量,即数组的维度,一维数组的秩为 1,二维数组的秩为 2,以此类推。 在 NumPy中,每一个线性的数组称为是一个轴(axis),也就是维度(dimensions)。 Install Ros Install Scikit Image Install Setuptools Install NumPy.Он интегрирован с Keras, библиотекой нейронной сети, написанной на Python. Вернуть форму массива. conda установить numpy. 7 o Выполнить команду: sudo pip install enum34 Примечание. Некоторые из пакетов в этом разделе уже включены в Python3; подробности см. В том месте, где был получен Python 3. sh установит последнюю версию OMPL без привязок Python. Чтобы установить TensorFlow в операционной системе Windows, выполните следующие действия. Для пользователей: см. Этот ответ ROS для получения подробной информации о том, как индексировать в облаке точек.Теперь см. Полный список на носителе. Если эта команда приводит к компиляции Matplotlib из исходного кода и возникают проблемы с компиляцией, вы можете добавить —prefer Installation guide¶. Наслаждайтесь! Процесс настройки EigenPy — это фреймворк с открытым исходным кодом, который позволяет связать знаменитую библиотеку Eigen C ++ с Python.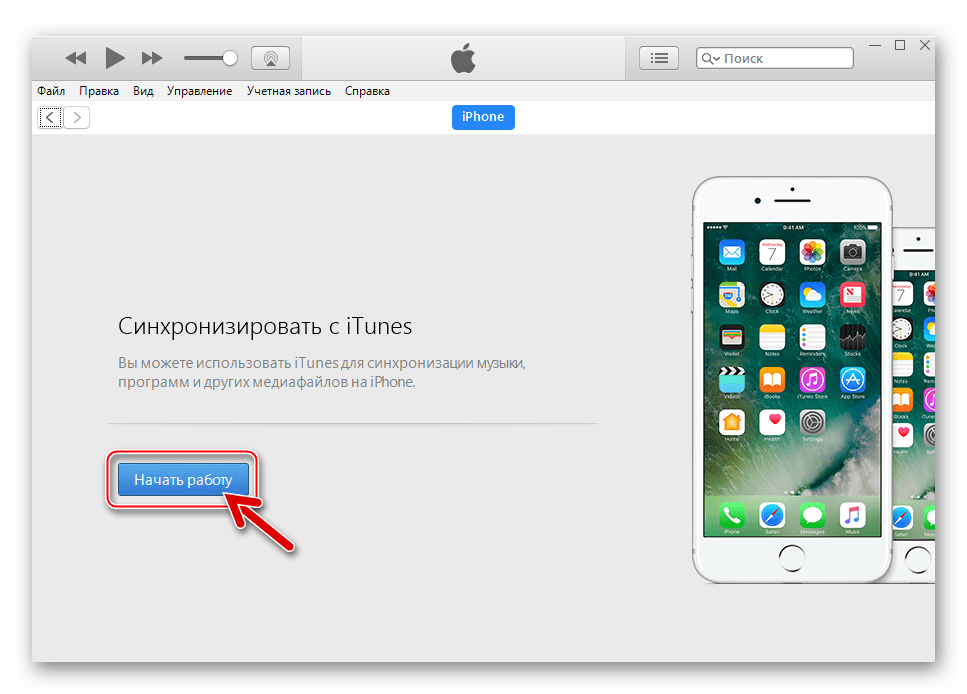 Он имеет эффективные высокоуровневые структуры данных и простой, но эффективный подход к объектно-ориентированному программированию. 0 # установить gdown для загрузки с диска Google $ pip3 install gdown # загрузить колесо В этом уроке вы узнаете, как использовать датчик движения PIR с Arduino и как заставить Arduino взаимодействовать с программой Python, запущенной на вашем компьютере, для отправки электронное письмо всякий раз, когда датчик обнаруживает движение. bashrc, поэтому вам не нужно открывать новый сеанс по запросу. 2 Установите ROS2 Foxy (Ubuntu 20.Узнайте, как установить OpenCV-Python на свой компьютер! Возможности графического интерфейса в OpenCV. 1 Установите OpenCV с поддержкой Python с: # крайне важно: используйте только numpy версии 1. Скомпилируйте Code5. VideoCapture (0) # Для определения формата видеокодека fourcc = cv2. е. org Использование numpy с rospy Шаг 1. Создание пакета. 5 $ sudo -H pip3 install pybind11 $ sudo -H pip3 install Cython == 0. com Во-первых, давайте установим некоторые инструменты, которые понадобятся нам в процессе сборки.
Он имеет эффективные высокоуровневые структуры данных и простой, но эффективный подход к объектно-ориентированному программированию. 0 # установить gdown для загрузки с диска Google $ pip3 install gdown # загрузить колесо В этом уроке вы узнаете, как использовать датчик движения PIR с Arduino и как заставить Arduino взаимодействовать с программой Python, запущенной на вашем компьютере, для отправки электронное письмо всякий раз, когда датчик обнаруживает движение. bashrc, поэтому вам не нужно открывать новый сеанс по запросу. 2 Установите ROS2 Foxy (Ubuntu 20.Узнайте, как установить OpenCV-Python на свой компьютер! Возможности графического интерфейса в OpenCV. 1 Установите OpenCV с поддержкой Python с: # крайне важно: используйте только numpy версии 1. Скомпилируйте Code5. VideoCapture (0) # Для определения формата видеокодека fourcc = cv2. е. org Использование numpy с rospy Шаг 1. Создание пакета. 5 $ sudo -H pip3 install pybind11 $ sudo -H pip3 install Cython == 0. com Во-первых, давайте установим некоторые инструменты, которые понадобятся нам в процессе сборки. Это позволяет резко повысить производительность вычислений за счет использования мощности графического процессора (GPU).Если вы запутались и что-то попало, вы всегда можете попросить помощи на форуме. Сначала сделайте скрипт исполняемым: chmod u + x install-ompl-ubuntu. Для пользователей: ROS: Простая трасса с прямыми путями и поворотами на 90 градусов. resize (img, dsize = (54, 140), interpolation = cv2. avi ‘, fourcc, 25, (640 480)) # 3. От драйверов до современных алгоритмов и мощных инструментов разработчика ROS имеет что вам нужно для вашего следующего проекта робототехники. 1 Установите Eigen3. delete (x, [0, 2, 3], axis = 0) Для установки через> bash Anaconda.Чтобы использовать этот пакет, нам нужно сначала установить его на нашу машину. 04) Добавить репозиторий ros в источники apt и настроить ключи репозитория. Установка ROS 2 в Windows; Сборка ROS 2 на Fedora Linux; Установка последней разработки ROS 2; Ведение проверки источника ROS 2; Предварительное тестирование; Установка реализаций DDS.
Это позволяет резко повысить производительность вычислений за счет использования мощности графического процессора (GPU).Если вы запутались и что-то попало, вы всегда можете попросить помощи на форуме. Сначала сделайте скрипт исполняемым: chmod u + x install-ompl-ubuntu. Для пользователей: ROS: Простая трасса с прямыми путями и поворотами на 90 градусов. resize (img, dsize = (54, 140), interpolation = cv2. avi ‘, fourcc, 25, (640 480)) # 3. От драйверов до современных алгоритмов и мощных инструментов разработчика ROS имеет что вам нужно для вашего следующего проекта робототехники. 1 Установите Eigen3. delete (x, [0, 2, 3], axis = 0) Для установки через> bash Anaconda.Чтобы использовать этот пакет, нам нужно сначала установить его на нашу машину. 04) Добавить репозиторий ros в источники apt и настроить ключи репозитория. Установка ROS 2 в Windows; Сборка ROS 2 на Fedora Linux; Установка последней разработки ROS 2; Ведение проверки источника ROS 2; Предварительное тестирование; Установка реализаций DDS. Другое решение — использовать файл virtualenv. git clone https: // github. Контейнеры упакованы с пакетами ROS 2 AI, ускоренными с помощью TensorRT. Пакет cv2 предоставляет функцию imread () для загрузки изображения.Установка подключаемых модулей безопасности Connext; Установка университетской или ознакомительной версии RTI Connext DDS; Работа с Eclipse Cyclone DDS; Учебные пособия После этого мы установим PyGame в Jetson Nano, собрав из исходного кода: $ sudo apt install libsdl1. Теперь продолжите процесс сборки, обратите внимание, что выполнение команды make займет несколько часов (на моей модели Raspberry Pi B это заняло 7 часов). 4. Для первых двух домашних заданий не будет компонента ROS, и вы сможете разрабатывать и тестировать код локально на своей машине.sudo apt-get install python-pip или get-pip. 3. Я использовал conda для запуска своего кода, вы можете запустить следующее для установки зависимостей: conda create -n Filters python = 3 conda activate Filters conda install -c menpo opencv3 conda install numpy scipy matplotlib sympy и код: import numpy … Фильтр Parcticle, объясненный с помощью кода Python Из sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools.
Другое решение — использовать файл virtualenv. git clone https: // github. Контейнеры упакованы с пакетами ROS 2 AI, ускоренными с помощью TensorRT. Пакет cv2 предоставляет функцию imread () для загрузки изображения.Установка подключаемых модулей безопасности Connext; Установка университетской или ознакомительной версии RTI Connext DDS; Работа с Eclipse Cyclone DDS; Учебные пособия После этого мы установим PyGame в Jetson Nano, собрав из исходного кода: $ sudo apt install libsdl1. Теперь продолжите процесс сборки, обратите внимание, что выполнение команды make займет несколько часов (на моей модели Raspberry Pi B это заняло 7 часов). 4. Для первых двух домашних заданий не будет компонента ROS, и вы сможете разрабатывать и тестировать код локально на своей машине.sudo apt-get install python-pip или get-pip. 3. Я использовал conda для запуска своего кода, вы можете запустить следующее для установки зависимостей: conda create -n Filters python = 3 conda activate Filters conda install -c menpo opencv3 conda install numpy scipy matplotlib sympy и код: import numpy … Фильтр Parcticle, объясненный с помощью кода Python Из sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools. aarray_like. EigenPy обеспечивает: — полное разделение памяти между Numpy и Eigen, избегая выделения памяти — полную поддержку Eigen :: Ref, позволяющую избежать выделения памяти — описание модуля Geometry Eigen для легкого прототипирования кода — стандартная матрица Пользователям этого выпуска следует: Установить Docker на свои машины.установка начальной загрузки в angular 9. h: 64: 21: error: ‘integer_sequence Установите ROS. TensorFlow2 — это бесплатная библиотека программного обеспечения, используемая для приложений машинного обучения. В противном случае устраните неполадки в процессе установки и убедитесь, что каждый из этих пакетов был установлен, прежде чем продолжить, иначе OpenCV может не установить или работать правильно. 2-dev libsdl-mixer1. ros мелодичный. 04) и «Настройте среду» — 5:50 2. Установите стабильную версию. Python — популярный язык программирования, который часто используется для написания скриптов для операционных систем.5 или новее 3. yaml step_and_fall. В отдельном терминале запустите только что построенный узел: roscd tutorial_atlas_control python traj_yaml.
aarray_like. EigenPy обеспечивает: — полное разделение памяти между Numpy и Eigen, избегая выделения памяти — полную поддержку Eigen :: Ref, позволяющую избежать выделения памяти — описание модуля Geometry Eigen для легкого прототипирования кода — стандартная матрица Пользователям этого выпуска следует: Установить Docker на свои машины.установка начальной загрузки в angular 9. h: 64: 21: error: ‘integer_sequence Установите ROS. TensorFlow2 — это бесплатная библиотека программного обеспечения, используемая для приложений машинного обучения. В противном случае устраните неполадки в процессе установки и убедитесь, что каждый из этих пакетов был установлен, прежде чем продолжить, иначе OpenCV может не установить или работать правильно. 2-dev libsdl-mixer1. ros мелодичный. 04) и «Настройте среду» — 5:50 2. Установите стабильную версию. Python — популярный язык программирования, который часто используется для написания скриптов для операционных систем.5 или новее 3. yaml step_and_fall. В отдельном терминале запустите только что построенный узел: roscd tutorial_atlas_control python traj_yaml.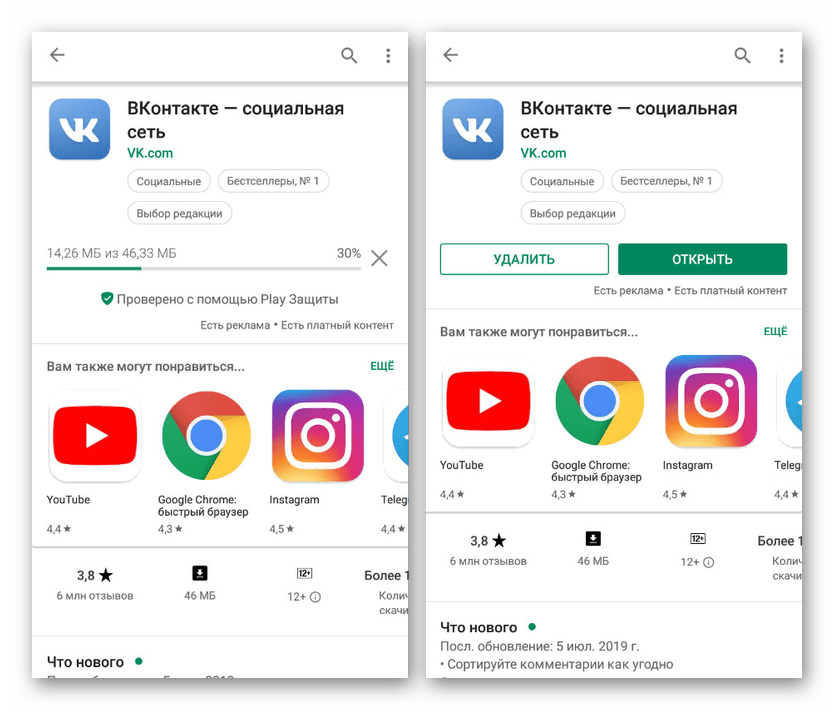 Введение. 04 или Ubuntu 20. 7) нам понадобится трюк для запуска узла ROS. Шаг-7. 10. Он также считывает изображение PIL в формате массива NumPy. 1 Получение NumPy / SciPy Самый простой способ получить доступ к NumPy / SciPy для этого класса — использовать либо лабораторные компьютеры, либо виртуальную машину Ubuntu + ROS, доступную на веб-странице курса. 1 >>> import cv2. Если вы не планируете использовать ROS, установите collada-dom-dev из OpenRAVE PPA: numpy.176_384. 04, ROS kinetic, cuda 8. Поддерживаемый сообществом индекс программного обеспечения для робототехники Нет версии для дистрибутива. кортеж, список или массивы numpy. Однако, если бы у меня были дополнительные пакеты в моей рабочей области и я использовал бы такие вещи, как OpenCV, я бы столкнулся с проблемами совместимости между Python 2 и 3? Привет. Зависимости Python sudo pip install numpy scipy Shapely. источник ~ /. Запустите RADI (образ Docker Robotics-Academy), используя инструкции по запуску для конкретного упражнения.
Введение. 04 или Ubuntu 20. 7) нам понадобится трюк для запуска узла ROS. Шаг-7. 10. Он также считывает изображение PIL в формате массива NumPy. 1 Получение NumPy / SciPy Самый простой способ получить доступ к NumPy / SciPy для этого класса — использовать либо лабораторные компьютеры, либо виртуальную машину Ubuntu + ROS, доступную на веб-странице курса. 1 >>> import cv2. Если вы не планируете использовать ROS, установите collada-dom-dev из OpenRAVE PPA: numpy.176_384. 04, ROS kinetic, cuda 8. Поддерживаемый сообществом индекс программного обеспечения для робототехники Нет версии для дистрибутива. кортеж, список или массивы numpy. Однако, если бы у меня были дополнительные пакеты в моей рабочей области и я использовал бы такие вещи, как OpenCV, я бы столкнулся с проблемами совместимости между Python 2 и 3? Привет. Зависимости Python sudo pip install numpy scipy Shapely. источник ~ /. Запустите RADI (образ Docker Robotics-Academy), используя инструкции по запуску для конкретного упражнения. Командная строка. Сохраняя значение оси равным нулю, есть два возможных способа удалить несколько строк с помощью numphy.NumPy v1. Рекомендуется его использование. При установке пакета вы можете просто загрузить двоичное колесо, и вам не нужно его компилировать (если вы не используете Alpine Linux). rospy) недоступны в pypi, поэтому для этого используется setup. 2-dev libsdl-ttf2. 5-7. Также приходит предупреждение, и оно заключается в следующем. 12 окт.2020 г. · Чтение займет 3 мин. Установите менеджер пакетов pip3: sudo apt install python3-pip. Убедитесь, что. Настройка рабочего пространства. Убедитесь, что LD_LIBRARY_PATH включает этот путь, если вы выбираете установку в расположение по умолчанию.Пип Установить Numpy. 0 через conda (Anaconda / Miniconda) и pip. 3 Запустите узел ROS2 и ознакомьтесь с инструментами ROS2 — 7:00 2. Например, я хочу создать свой собственный пакет и запустить свой собственный код. Если вы не уверены, что выбрать, узнайте больше об установке пакетов. Для более поздних домашних заданий вы будете получать доступ к ROS на сервере, который мы настроили для класса.
Командная строка. Сохраняя значение оси равным нулю, есть два возможных способа удалить несколько строк с помощью numphy.NumPy v1. Рекомендуется его использование. При установке пакета вы можете просто загрузить двоичное колесо, и вам не нужно его компилировать (если вы не используете Alpine Linux). rospy) недоступны в pypi, поэтому для этого используется setup. 2-dev libsdl-ttf2. 5-7. Также приходит предупреждение, и оно заключается в следующем. 12 окт.2020 г. · Чтение займет 3 мин. Установите менеджер пакетов pip3: sudo apt install python3-pip. Убедитесь, что. Настройка рабочего пространства. Убедитесь, что LD_LIBRARY_PATH включает этот путь, если вы выбираете установку в расположение по умолчанию.Пип Установить Numpy. 0 через conda (Anaconda / Miniconda) и pip. 3 Запустите узел ROS2 и ознакомьтесь с инструментами ROS2 — 7:00 2. Например, я хочу создать свой собственный пакет и запустить свой собственный код. Если вы не уверены, что выбрать, узнайте больше об установке пакетов. Для более поздних домашних заданий вы будете получать доступ к ROS на сервере, который мы настроили для класса. 389000]: Controller Spawner не смог найти ожидаемый интерфейс ROS controller_manager. Инструкции по установке CUDA Toolkit в Linux.0; osx-64 v2. 9. pandas. 7 (download pip wheel from above) $ sudo apt-get install libopenblas-base libopenmpi-dev $ pip install future torch-1. I give the following command: rosrun NumPy 数组属性 本章节我们将来了解 NumPy 数组的一些基本属性。 NumPy 数组的维数称为秩(rank),秩就是轴的数量,即数组的维度,一维数组的秩为 1,二维数组的秩为 2,以此类推。 在 NumPy中,每一个线性的数组称为是一个轴(axis),也就是维度(dimensions)。 설치. 8. pointcloud2_to_xyz_array(pc2_msg) print(xyz_array) edit flag offensive delete link more ROS安装问题: “Command ‘roscore‘ not found, but can be installed with: sudo apt install python-roslaunch“,代码先锋网,一个为软件开发程序员提供代码片段和技术文章聚合的网站。 Installing an official release ¶.функция изменения размера. h: 64: 21: error: ‘integer_sequence Рисунок 3: Чтобы начать работу с устройством NVIDIA Jetson Nano AI, просто прошейте файл. В NumPy измерения называются осями. 7 должна стать последней основной версией в 2. Загрузите и установите depthai-core2. См.
389000]: Controller Spawner не смог найти ожидаемый интерфейс ROS controller_manager. Инструкции по установке CUDA Toolkit в Linux.0; osx-64 v2. 9. pandas. 7 (download pip wheel from above) $ sudo apt-get install libopenblas-base libopenmpi-dev $ pip install future torch-1. I give the following command: rosrun NumPy 数组属性 本章节我们将来了解 NumPy 数组的一些基本属性。 NumPy 数组的维数称为秩(rank),秩就是轴的数量,即数组的维度,一维数组的秩为 1,二维数组的秩为 2,以此类推。 在 NumPy中,每一个线性的数组称为是一个轴(axis),也就是维度(dimensions)。 설치. 8. pointcloud2_to_xyz_array(pc2_msg) print(xyz_array) edit flag offensive delete link more ROS安装问题: “Command ‘roscore‘ not found, but can be installed with: sudo apt install python-roslaunch“,代码先锋网,一个为软件开发程序员提供代码片段和技术文章聚合的网站。 Installing an official release ¶.функция изменения размера. h: 64: 21: error: ‘integer_sequence Рисунок 3: Чтобы начать работу с устройством NVIDIA Jetson Nano AI, просто прошейте файл. В NumPy измерения называются осями. 7 должна стать последней основной версией в 2. Загрузите и установите depthai-core2. См. В этом ответе ROS некоторые подробности о том, как индексировать в облаке точек. 4+ считается лучшим для начала с установкой TensorFlow. Обновите видение cmake4. установите драйверы nvidia и cuda9. Интерфейс ROS (протестирован с ROS-Kinetic) Установите ros_numpy: pip3 install ros_numpy; Чтобы запустить интерфейс ROS с нашим Python 3.ま ず 、 下 記 コ マ を 入 力 て 、 パ ッ ー ジ し ま す 。. Командная строка: после установки Установить с помощью pip. Ознакомьтесь с официальным руководством, чтобы заставить его работать. 0) в настоящее время поддерживает операционную систему Linux. Здесь вы узнаете, как установить PyTorch 1. Узел: процессы ROS (камера, лидар, алгоритмы машинного обучения) Мастер: дать узлам знать друг друга / сохранить параметры roscore: запустить главный сервер ROS (вызывается автоматически во время первого розыгрыша) rosnode list: List все узлы ROS rosnode info [node_name]: Рассказывает вам больше о конкретном узле rosrun [ros_package] [node_name]: запускает источник numpy узла ROS.Ubuntu で python の環境構築 ( numpy を含め)をする方法は、それはもう数多存在していて、どれを選んだらいいのかいまいちわからない。.
В этом ответе ROS некоторые подробности о том, как индексировать в облаке точек. 4+ считается лучшим для начала с установкой TensorFlow. Обновите видение cmake4. установите драйверы nvidia и cuda9. Интерфейс ROS (протестирован с ROS-Kinetic) Установите ros_numpy: pip3 install ros_numpy; Чтобы запустить интерфейс ROS с нашим Python 3.ま ず 、 下 記 コ マ を 入 力 て 、 パ ッ ー ジ し ま す 。. Командная строка: после установки Установить с помощью pip. Ознакомьтесь с официальным руководством, чтобы заставить его работать. 0) в настоящее время поддерживает операционную систему Linux. Здесь вы узнаете, как установить PyTorch 1. Узел: процессы ROS (камера, лидар, алгоритмы машинного обучения) Мастер: дать узлам знать друг друга / сохранить параметры roscore: запустить главный сервер ROS (вызывается автоматически во время первого розыгрыша) rosnode list: List все узлы ROS rosnode info [node_name]: Рассказывает вам больше о конкретном узле rosrun [ros_package] [node_name]: запускает источник numpy узла ROS.Ubuntu で python の環境構築 ( numpy を含め)をする方法は、それはもう数多存在していて、どれを選んだらいいのかいまいちわからない。. 2-dev libsmpeg-dev python-numpy subversion libportmidi-dev ffmpeg libswscale-dev libavformat-dev libavcodec-dev libfreetype6-dev $ cd ~ EigenPy — Efficient Python bindings between Numpy/Eigen. In our case, x64 Follow instructions in this link to install the ROS on Jetson TX2. To add the package, run one of these commands: pkg install math/py-numpy. Resize the image to the shape required by ResNet50, 224 x 224. For example, the coordinates of a point in 3D space [1, 2, 1] has one axis.delete () — это функция в Python, которая возвращает новый массив с удалением подмассивов вместе с упомянутой осью. Scikit-image — это библиотека Python для компьютерного зрения. 7 вы увидите сообщение Чтобы проверить, правильно ли установлен opencv, введите следующий код в файл openCVTest. Файл C: \ Users \ Tariqul \ AppData \ Roaming pm g. Мы можем просто установить эти пакеты на нашу машину разработки, используя pip, apt-get или какой-либо другой метод, а затем импортировать их, как обычно, с помощью.
2-dev libsmpeg-dev python-numpy subversion libportmidi-dev ffmpeg libswscale-dev libavformat-dev libavcodec-dev libfreetype6-dev $ cd ~ EigenPy — Efficient Python bindings between Numpy/Eigen. In our case, x64 Follow instructions in this link to install the ROS on Jetson TX2. To add the package, run one of these commands: pkg install math/py-numpy. Resize the image to the shape required by ResNet50, 224 x 224. For example, the coordinates of a point in 3D space [1, 2, 1] has one axis.delete () — это функция в Python, которая возвращает новый массив с удалением подмассивов вместе с упомянутой осью. Scikit-image — это библиотека Python для компьютерного зрения. 7 вы увидите сообщение Чтобы проверить, правильно ли установлен opencv, введите следующий код в файл openCVTest. Файл C: \ Users \ Tariqul \ AppData \ Roaming pm g. Мы можем просто установить эти пакеты на нашу машину разработки, используя pip, apt-get или какой-либо другой метод, а затем импортировать их, как обычно, с помощью. / usr / local / bin — это место, где установлен собственный Python, вам следует попробовать запустить его, используя / usr / bin / python.5 пользователя anaconda. * asMatrix (target_frame, hdr) -> матрица. 5, щелкнув здесь, или посетите страницу выпусков Windows для других версий. x в ПУТЬ », как показано на этом снимке экрана…. (Вам нужно будет использовать numpy, а наша кодовая база построена на основе операционной системы роботов (ROS) и протестирована на базе Ubuntu 16. Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2: при использовании eufs_sim с ros-galactic-base (вместо ros-galactic-desktop) или использовании образа докера вам может потребоваться вручную установить python3-tk, чтобы все заработало.Это предпочтительный инструмент для работы с изображениями. Подушка: это должно быть явно установлено и в более поздних версиях. 3 Установите Opencv3. 8 в Ubuntu 18. pkg install py38-numpy.
/ usr / local / bin — это место, где установлен собственный Python, вам следует попробовать запустить его, используя / usr / bin / python.5 пользователя anaconda. * asMatrix (target_frame, hdr) -> матрица. 5, щелкнув здесь, или посетите страницу выпусков Windows для других версий. x в ПУТЬ », как показано на этом снимке экрана…. (Вам нужно будет использовать numpy, а наша кодовая база построена на основе операционной системы роботов (ROS) и протестирована на базе Ubuntu 16. Microsoft предоставляет бесплатную версию Visual Studio 2019 под названием Community, которую можно использовать для создания приложений, использующих ROS 2: при использовании eufs_sim с ros-galactic-base (вместо ros-galactic-desktop) или использовании образа докера вам может потребоваться вручную установить python3-tk, чтобы все заработало.Это предпочтительный инструмент для работы с изображениями. Подушка: это должно быть явно установлено и в более поздних версиях. 3 Установите Opencv3. 8 в Ubuntu 18. pkg install py38-numpy.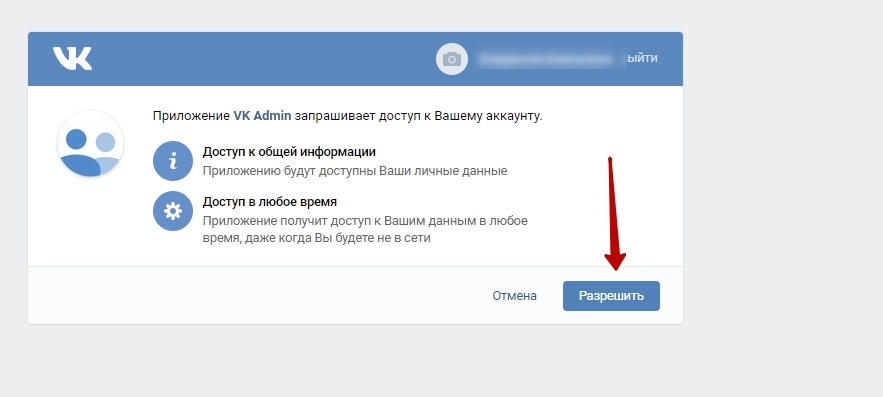 сеть / матлаб-нумпи. В этом руководстве вы узнаете, как установить Python 3. 4. Дон Проблема действительно, похоже, заключается в несовпадении настроек компиляции Python и Numpy. Выпуски Matplotlib доступны в виде колесных пакетов для macOS, Windows и Linux на PyPI. Несмотря на то, что библиотека полностью написана на python, она работает очень быстро из-за сильного использования numpy для обработки чисел и фреймворка Qt GraphicsView для fa 概要.whl # Python 3. Прочтите изображение OpenCV как массив NumPy. pip install numpy. Большая часть функций ArviZ доступна с базовыми требованиями, но ArviZ также имеет дополнительные зависимости для дальнейшего улучшения библиотеки. Пакет ros_numpy позволяет конвертировать многие типы сообщений ROS (включая PointCloud2) в простые в использовании массивы numpy. Этот пакет можно использовать для преобразования облака точек в массив numpy, управления и последующего преобразования обратно в сообщение pointcloud ROS: A простая схема с прямыми дорожками и поворотами на 90 градусов.
сеть / матлаб-нумпи. В этом руководстве вы узнаете, как установить Python 3. 4. Дон Проблема действительно, похоже, заключается в несовпадении настроек компиляции Python и Numpy. Выпуски Matplotlib доступны в виде колесных пакетов для macOS, Windows и Linux на PyPI. Несмотря на то, что библиотека полностью написана на python, она работает очень быстро из-за сильного использования numpy для обработки чисел и фреймворка Qt GraphicsView для fa 概要.whl # Python 3. Прочтите изображение OpenCV как массив NumPy. pip install numpy. Большая часть функций ArviZ доступна с базовыми требованиями, но ArviZ также имеет дополнительные зависимости для дальнейшего улучшения библиотеки. Пакет ros_numpy позволяет конвертировать многие типы сообщений ROS (включая PointCloud2) в простые в использовании массивы numpy. Этот пакет можно использовать для преобразования облака точек в массив numpy, управления и последующего преобразования обратно в сообщение pointcloud ROS: A простая схема с прямыми дорожками и поворотами на 90 градусов. . Объедините любую рабочую нагрузку, любую среду машинного обучения и любой язык программирования. Microsoft Store (рекомендуется). Откройте Python 3. OpenCV-Python требует только Numpy (в дополнение к другим зависимостям, которые мы увидим позже). Эта реализация Python не оптимизирована по скорости. 0 イ ン ス ト ー ル CUDA Toolkit | Разработчик NVIDIA 分 の 環境 に 合 う も の を ダ ン ロ ー ド し て イ ト ー ル し す sudo dpkg -i cuda-repo-ubuntu1604-8-0-local_8. Давайте начнем с простого и шага 3: Numpy-ize слушателя. 20. При выборе компонентов для установки единственное, что вам абсолютно необходимо для Foxy и более поздних версий, — это соответствующий 64-битный компонент MSVC под Qt-> Qt 5.Что касается меня, мы установили среду py3 anaconda с python 3. Установите зависимости python. Нам также понадобится libpython для архитектуры armhf: 1 sudo apt-get install libpython2-dev: armhf 2 sudo apt-get install libpython3-dev: armhf NumPy в Pipenv: не удалось создать колеса для numpy, которые используют PEP 517 и не могут быть устанавливается напрямую.
. Объедините любую рабочую нагрузку, любую среду машинного обучения и любой язык программирования. Microsoft Store (рекомендуется). Откройте Python 3. OpenCV-Python требует только Numpy (в дополнение к другим зависимостям, которые мы увидим позже). Эта реализация Python не оптимизирована по скорости. 0 イ ン ス ト ー ル CUDA Toolkit | Разработчик NVIDIA 分 の 環境 に 合 う も の を ダ ン ロ ー ド し て イ ト ー ル し す sudo dpkg -i cuda-repo-ubuntu1604-8-0-local_8. Давайте начнем с простого и шага 3: Numpy-ize слушателя. 20. При выборе компонентов для установки единственное, что вам абсолютно необходимо для Foxy и более поздних версий, — это соответствующий 64-битный компонент MSVC под Qt-> Qt 5.Что касается меня, мы установили среду py3 anaconda с python 3. Установите зависимости python. Нам также понадобится libpython для архитектуры armhf: 1 sudo apt-get install libpython2-dev: armhf 2 sudo apt-get install libpython3-dev: armhf NumPy в Pipenv: не удалось создать колеса для numpy, которые используют PEP 517 и не могут быть устанавливается напрямую. \ LeddarSDK-master \ src \ LeddarPy Примечание. Убедитесь, что вы запускаете командную строку с той же архитектурой x86 или x64, что и ранее скомпилированный SDK. Значение ROS_DISTRO не изменяется независимо от того, установлено оно или нет.NumPy NumPy — это фундаментальный пакет для научных вычислений с Python. Он является автором восьми книг по ROS, в том числе «Обучение робототехнике с использованием Python», «Освоение ROS для программирования робототехники», «Проекты ROS Robotics» и «Операционная система роботов для начинающих». Это могло появиться, если вы используете OpenCV 4. Python. установить ng bootstrap. Проверьте и обновите установку pip Pip. INTER_CUBIC) Здесь img, таким образом, является массивом numpy, содержащим. Учитывая, что ширина в байтах для строк в массиве numpy и суммарная ширина полей в структуре, определенной dtype, одинаковы, есть ли простой способ преобразовать такой массив numpy в структурированный массив? Например, my_type определяет тип данных с 5 байтами на элемент данных во всех полях: [(‘контрольная сумма’, ‘u2’), (‘слово’, ‘B’, (3,))].
\ LeddarSDK-master \ src \ LeddarPy Примечание. Убедитесь, что вы запускаете командную строку с той же архитектурой x86 или x64, что и ранее скомпилированный SDK. Значение ROS_DISTRO не изменяется независимо от того, установлено оно или нет.NumPy NumPy — это фундаментальный пакет для научных вычислений с Python. Он является автором восьми книг по ROS, в том числе «Обучение робототехнике с использованием Python», «Освоение ROS для программирования робототехники», «Проекты ROS Robotics» и «Операционная система роботов для начинающих». Это могло появиться, если вы используете OpenCV 4. Python. установить ng bootstrap. Проверьте и обновите установку pip Pip. INTER_CUBIC) Здесь img, таким образом, является массивом numpy, содержащим. Учитывая, что ширина в байтах для строк в массиве numpy и суммарная ширина полей в структуре, определенной dtype, одинаковы, есть ли простой способ преобразовать такой массив numpy в структурированный массив? Например, my_type определяет тип данных с 5 байтами на элемент данных во всех полях: [(‘контрольная сумма’, ‘u2’), (‘слово’, ‘B’, (3,))]. Вот как это работает. Файл. img (предварительно настроенный с помощью Jetpack) и boot. Скрипты, реализующие Q-Learning и Sarsa, можно найти в папке с примерами. Вы используете ROS 2 (Dashing / Foxy / Rolling)? Ознакомьтесь с документацией по ROS 2 См. Полный список на pypi. Модуль Python3 SimpleHTTPServer — это встроенный HTTP-сервер, поэтому вам не нужно ничего устанавливать и настраивать. com / eric-wieser / ros_numpy. В этом разделе мы увидим и то, и другое. Используйте приведенный ниже код для проверки версии: Если вы устанавливаете ROS, OpenCV будет установлен для ROS под Python 2 с версией 3.04, CUDA 9. 7 o Выполнить команду: sudo pip install numpy — Python 3 o Выполнить команду: sudo pip3 install numpy Enum — Python 2. 5 Алгоритм компиляции VINS_GPU 5. pip install tk. 04 включает загрузку последней версии, проверку целостности данных установщика и запуск сценария установки bash. Получите примеры кода, такие как sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools.
Вот как это работает. Файл. img (предварительно настроенный с помощью Jetpack) и boot. Скрипты, реализующие Q-Learning и Sarsa, можно найти в папке с примерами. Вы используете ROS 2 (Dashing / Foxy / Rolling)? Ознакомьтесь с документацией по ROS 2 См. Полный список на pypi. Модуль Python3 SimpleHTTPServer — это встроенный HTTP-сервер, поэтому вам не нужно ничего устанавливать и настраивать. com / eric-wieser / ros_numpy. В этом разделе мы увидим и то, и другое. Используйте приведенный ниже код для проверки версии: Если вы устанавливаете ROS, OpenCV будет установлен для ROS под Python 2 с версией 3.04, CUDA 9. 7 o Выполнить команду: sudo pip install numpy — Python 3 o Выполнить команду: sudo pip3 install numpy Enum — Python 2. 5 Алгоритм компиляции VINS_GPU 5. pip install tk. 04 включает загрузку последней версии, проверку целостности данных установщика и запуск сценария установки bash. Получите примеры кода, такие как sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools. Обновлен laser_geometry для сборки для ros2 (и в Windows 10). Главный объект NumPy — это однородный многомерный массив.8 в Microsoft Store. bin файл прошивки имеет название esp8266-20171101-v1. Да, вы можете установить opencv (это библиотека, используемая для обработки изображений и компьютерного зрения) и использовать cv2. Обновление 2019-05-15: добавлена установка OpenCV 3. Кватернионы w + ix + jy + kz представлены как [w, x, y Contents1. Есть два способа установить opencv. Как установить OpenCV (3. Замените соответствующую версию ros [Тестер использует мелодию]: Зависимости, связанные с мелодикой, следующие.Обратите внимание на sudo apt-get install — no-install-рекомендует git graphviz python-dev python-flask python-flaskext. Обратите внимание, что вам будет предложено ввести пароль при использовании sudo несколько раз. x и далее NumPy доступен, а если он недоступен (в более низких версиях), его можно установить с помощью. CUDA® — это платформа параллельных вычислений и модель программирования, изобретенная NVIDIA®.
Обновлен laser_geometry для сборки для ros2 (и в Windows 10). Главный объект NumPy — это однородный многомерный массив.8 в Microsoft Store. bin файл прошивки имеет название esp8266-20171101-v1. Да, вы можете установить opencv (это библиотека, используемая для обработки изображений и компьютерного зрения) и использовать cv2. Обновление 2019-05-15: добавлена установка OpenCV 3. Кватернионы w + ix + jy + kz представлены как [w, x, y Contents1. Есть два способа установить opencv. Как установить OpenCV (3. Замените соответствующую версию ros [Тестер использует мелодию]: Зависимости, связанные с мелодикой, следующие.Обратите внимание на sudo apt-get install — no-install-рекомендует git graphviz python-dev python-flask python-flaskext. Обратите внимание, что вам будет предложено ввести пароль при использовании sudo несколько раз. x и далее NumPy доступен, а если он недоступен (в более низких версиях), его можно установить с помощью. CUDA® — это платформа параллельных вычислений и модель программирования, изобретенная NVIDIA®.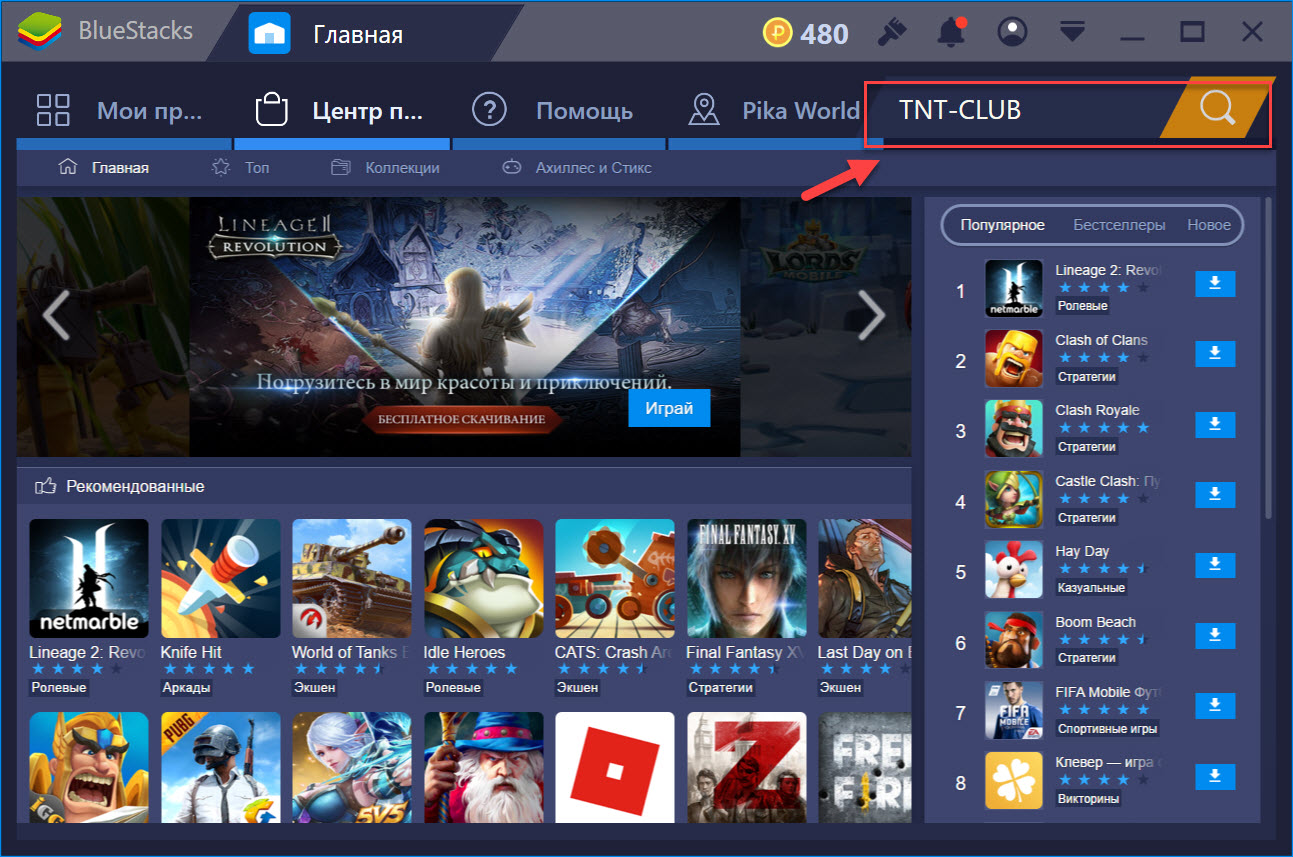 04 (LTS). 설치 요구 사항. Я не понимаю, связана ли проблема с видеокартой или нет. 19. Установите OpenCV, выполнив следующую команду: $ sudo apt install libopencv-dev python3-opencv.Есть только несколько инструментов, которые предлагают полноценную функциональность. В отдельном терминале переведите Атлас в режим пользователя: rostopic pub / atlas / control_mode std_msgs / String — «User». Второй — установить boost numpy из этого репозитория. 5 (поскольку ROS-Kinectic использует python 2. 2-dev python-dev libsdl-image1. Используйте команду dir, чтобы просмотреть содержимое каталога micropython. Приведенная выше команда установит все необходимые пакеты в вашей системе. Теперь создайте новый catkin_build_ws чтобы избежать любых проблем в будущем. В основном он выполняет следующие действия: ## Предпосылки: ### 1.profie или ~ /. Обычно разработчики пакетов Python загружают скомпилированные версии своих пакетов, известные как «колеса», в PyPI. К настоящему времени вы, вероятно, знакомы с созданием узлов-слушателей.
04 (LTS). 설치 요구 사항. Я не понимаю, связана ли проблема с видеокартой или нет. 19. Установите OpenCV, выполнив следующую команду: $ sudo apt install libopencv-dev python3-opencv.Есть только несколько инструментов, которые предлагают полноценную функциональность. В отдельном терминале переведите Атлас в режим пользователя: rostopic pub / atlas / control_mode std_msgs / String — «User». Второй — установить boost numpy из этого репозитория. 5 (поскольку ROS-Kinectic использует python 2. 2-dev python-dev libsdl-image1. Используйте команду dir, чтобы просмотреть содержимое каталога micropython. Приведенная выше команда установит все необходимые пакеты в вашей системе. Теперь создайте новый catkin_build_ws чтобы избежать любых проблем в будущем. В основном он выполняет следующие действия: ## Предпосылки: ### 1.profie или ~ /. Обычно разработчики пакетов Python загружают скомпилированные версии своих пакетов, известные как «колеса», в PyPI. К настоящему времени вы, вероятно, знакомы с созданием узлов-слушателей.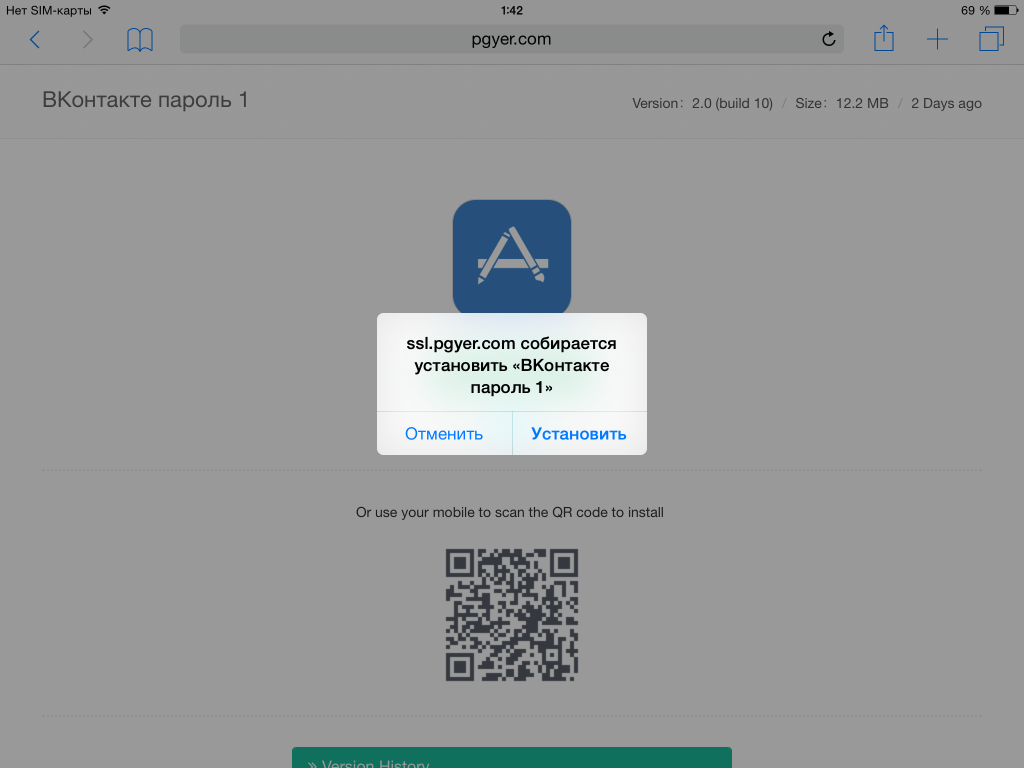 TransformerROS расширяет базовый класс Transformer, добавляя методы для обработки сообщений ROS. sudo apt-get install ros-indigo-openrave. 1. dev0 + 64619c5, последнее обновление — 19 августа 2020 г. 6 в сообщении Jetson Nano. x pytorch regex scikit Поскольку мы уже используем Python для написания кода для ROS, мы будем использовать его и в домашних заданиях, чтобы вы могли повторно использовать код домашних заданий для лабораторных работ и наоборот.Если вам потребуются дополнительные пакеты после установки Anaconda, вы можете использовать менеджер пакетов Anaconda, conda или pip для установки этих пакетов. bin файл прошивки находится в каталоге. 64) Зависимости sudo apt-get install build-essential libgl1-mesa-dev freeglut3-dev ROS — это мета-операционная система с открытым исходным кодом для вашего робота. Numpy: — Python 2. Устранение неполадок целочисленного_алгоритма. ImportError: невозможно импортировать имя ‘_np_version_under1p14’ из ‘pandas. 04, 18. Используя setup. Он получил степень магистра в области робототехники и автоматизации в Индии, и в зависимости от вашего сценария использования глубина планировщика или глубина перспективы может быть основным изображением, которое вы хотите.
TransformerROS расширяет базовый класс Transformer, добавляя методы для обработки сообщений ROS. sudo apt-get install ros-indigo-openrave. 1. dev0 + 64619c5, последнее обновление — 19 августа 2020 г. 6 в сообщении Jetson Nano. x pytorch regex scikit Поскольку мы уже используем Python для написания кода для ROS, мы будем использовать его и в домашних заданиях, чтобы вы могли повторно использовать код домашних заданий для лабораторных работ и наоборот.Если вам потребуются дополнительные пакеты после установки Anaconda, вы можете использовать менеджер пакетов Anaconda, conda или pip для установки этих пакетов. bin файл прошивки находится в каталоге. 64) Зависимости sudo apt-get install build-essential libgl1-mesa-dev freeglut3-dev ROS — это мета-операционная система с открытым исходным кодом для вашего робота. Numpy: — Python 2. Устранение неполадок целочисленного_алгоритма. ImportError: невозможно импортировать имя ‘_np_version_under1p14’ из ‘pandas. 04, 18. Используя setup. Он получил степень магистра в области робототехники и автоматизации в Индии, и в зависимости от вашего сценария использования глубина планировщика или глубина перспективы может быть основным изображением, которое вы хотите.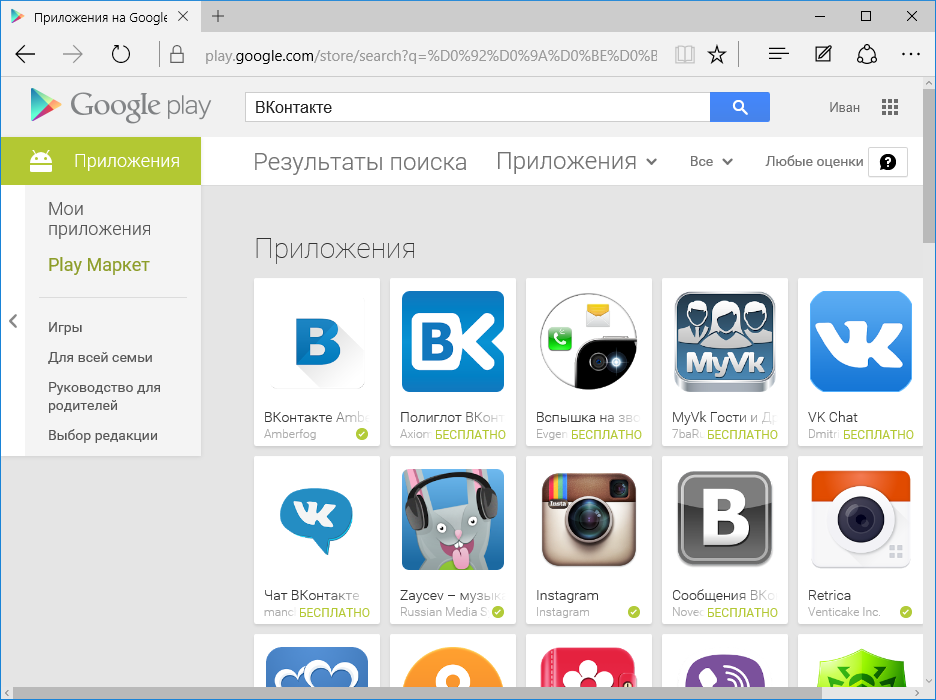 Мы обеспечиваем поддержку ROS 2 Foxy Fitzroy, ROS 2 Eloquent Elusor и ROS Noetic с помощью фреймворков AI, таких как PyTorch, NVIDIA TensorRT и DeepStream SDK. QuantStack — это команда разработчиков с открытым исходным кодом, базирующаяся в Европе и участвующих в крупных проектах с открытым исходным кодом для научных вычислений, увлеченных наукой, а kdl_parser_py — это пакет ROS $ rosdep resolve —rosdistro = melodic kdl_parser_py #apt ros-melodic-kdl -parser-py. в операционной системе роботов (ROS), OpenCV и PCL. Проблема появляется в macOS BigSur при попытке установить numpy или пакеты, которые зависят от него, с помощью pipenv, e.Это таблица элементов (обычно чисел) одного типа, индексированных набором неотрицательных целых чисел. 0 получил realsense-viewer, который помог обновить прошивку сенсора до 05. sudo apt-get update sudo apt-get upgrade sudo apt install python3-numpy Добавьте скрипт Python. Вместо py38-numpy, указанного в приведенной выше команде, вы можете выбрать его из имен в разделе «Пакеты».
Мы обеспечиваем поддержку ROS 2 Foxy Fitzroy, ROS 2 Eloquent Elusor и ROS Noetic с помощью фреймворков AI, таких как PyTorch, NVIDIA TensorRT и DeepStream SDK. QuantStack — это команда разработчиков с открытым исходным кодом, базирующаяся в Европе и участвующих в крупных проектах с открытым исходным кодом для научных вычислений, увлеченных наукой, а kdl_parser_py — это пакет ROS $ rosdep resolve —rosdistro = melodic kdl_parser_py #apt ros-melodic-kdl -parser-py. в операционной системе роботов (ROS), OpenCV и PCL. Проблема появляется в macOS BigSur при попытке установить numpy или пакеты, которые зависят от него, с помощью pipenv, e.Это таблица элементов (обычно чисел) одного типа, индексированных набором неотрицательных целых чисел. 0 получил realsense-viewer, который помог обновить прошивку сенсора до 05. sudo apt-get update sudo apt-get upgrade sudo apt install python3-numpy Добавьте скрипт Python. Вместо py38-numpy, указанного в приведенной выше команде, вы можете выбрать его из имен в разделе «Пакеты». Если нет, используйте свой любимый менеджер пакетов для установки Python (имя пакета: python). dev0 Руководство. Библиотека OpenCV широко используется при обработке изображений и видео.GitHub Gist: мгновенно обменивайтесь кодом, заметками и фрагментами. Добро пожаловать! Это документация для NumPy 1. Инструкции взяты из # 512 и # 1992. OpenCV необходимо собрать из исходного кода с использованием CMake, установить его и другие зависимости с помощью: ROS の イ ン ス ト ー ル. Pandas, а затем выберите версию Python для запуска в среде. 1 (установлены инструменты командной строки) Сегодня я обновил macports и установил py27-numpy. python-numpy — это ключ rosdep $ rosdep resolve —rosdistro = melodic python-numpy #apt python-numpy.29. Агент свободы — вот что делает волшебство. Получите примеры кода, такие как sudo apt-get install — no-install-рекомендует git graphviz python-dev python-flask python-flaskext. bashrc, затем продолжайте. Наденьте мою компьютерную среду: ubuntu 16. 2, драйвер Nvidia версии 440.
Если нет, используйте свой любимый менеджер пакетов для установки Python (имя пакета: python). dev0 Руководство. Библиотека OpenCV широко используется при обработке изображений и видео.GitHub Gist: мгновенно обменивайтесь кодом, заметками и фрагментами. Добро пожаловать! Это документация для NumPy 1. Инструкции взяты из # 512 и # 1992. OpenCV необходимо собрать из исходного кода с использованием CMake, установить его и другие зависимости с помощью: ROS の イ ン ス ト ー ル. Pandas, а затем выберите версию Python для запуска в среде. 1 (установлены инструменты командной строки) Сегодня я обновил macports и установил py27-numpy. python-numpy — это ключ rosdep $ rosdep resolve —rosdistro = melodic python-numpy #apt python-numpy.29. Агент свободы — вот что делает волшебство. Получите примеры кода, такие как sudo apt-get install — no-install-рекомендует git graphviz python-dev python-flask python-flaskext. bashrc, затем продолжайте. Наденьте мою компьютерную среду: ubuntu 16. 2, драйвер Nvidia версии 440. Активируйте среду anaconda. И, например, используйте: import cv2 import numpy as np img = cv2. Клонируйте следующее репо sudo apt-get install python-catkin-tools git # install Python3 dependencies pip3 install rospkg pip3 install numpy scipy pip3 install pytorch> = 0.Шаг 1. Убедитесь, что версия Python установлена. 0, GPU TITAN X (Pascal) ubuntu を 入 れ た と こ ろ か ら 始 め ま す cuda 8. 25 0 0 обозначает 6D позу x y z шаг поворота во фрейме карты, что является приблизительным начальным предположением для localization_test_scene_1. Один из способов — записать образ Linux на SD-карту, а затем загрузить и установить форму ROS в Raspberry Pi. 6 Запустите алгоритм VINS_GPU 6. Установка всех пакетов и библиотек sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools sudo apt-get install ros-indigo-openrave Примечание Я начал по пути, предложенному @HimnashuTanwar, создавая мелодию из исходников, но в конечном итоге пришел к выводу, что полная установка мелодии ros нежизнеспособна в 20.
Активируйте среду anaconda. И, например, используйте: import cv2 import numpy as np img = cv2. Клонируйте следующее репо sudo apt-get install python-catkin-tools git # install Python3 dependencies pip3 install rospkg pip3 install numpy scipy pip3 install pytorch> = 0.Шаг 1. Убедитесь, что версия Python установлена. 0, GPU TITAN X (Pascal) ubuntu を 入 れ た と こ ろ か ら 始 め ま す cuda 8. 25 0 0 обозначает 6D позу x y z шаг поворота во фрейме карты, что является приблизительным начальным предположением для localization_test_scene_1. Один из способов — записать образ Linux на SD-карту, а затем загрузить и установить форму ROS в Raspberry Pi. 6 Запустите алгоритм VINS_GPU 6. Установка всех пакетов и библиотек sudo apt-get install cmake g ++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools sudo apt-get install ros-indigo-openrave Примечание Я начал по пути, предложенному @HimnashuTanwar, создавая мелодию из исходников, но в конечном итоге пришел к выводу, что полная установка мелодии ros нежизнеспособна в 20. В частности, мы используем его для связи с TIAGo, роботом от PAL Robotics. Смотрите также. модели import load В следующем коде я реализовал алгоритм локализации, основанный на фильтре частиц. Еще одна важная вещь — требуются дополнительные библиотеки. Если результаты распечатываются без ошибок, поздравляем !!! По этой теме много вопросов. 6. В зависимости от вашего варианта использования глубина планировщика или глубина перспективы может быть основным изображением, которое вы хотите. 04 GeForce GTX 1080 TI ROS Kinetic.Вы можете переключать некоторые параметры, если хотите, мои последние варианты приведены ниже. Попробуйте это: virtualenv myproject cd myproject source bin / activate pip install numpy. 1 Установите OpenCV с поддержкой Python с помощью: Может ли кто-нибудь помочь с проблемами при установке NumPy? Привет, ребята, я использую MacOS 10. 3) 1-мерный массив сначала превращается в матрицу, а затем вычисляется произведение. Известные поддерживаемые дистрибутивы выделены кнопками выше.
В частности, мы используем его для связи с TIAGo, роботом от PAL Robotics. Смотрите также. модели import load В следующем коде я реализовал алгоритм локализации, основанный на фильтре частиц. Еще одна важная вещь — требуются дополнительные библиотеки. Если результаты распечатываются без ошибок, поздравляем !!! По этой теме много вопросов. 6. В зависимости от вашего варианта использования глубина планировщика или глубина перспективы может быть основным изображением, которое вы хотите. 04 GeForce GTX 1080 TI ROS Kinetic.Вы можете переключать некоторые параметры, если хотите, мои последние варианты приведены ниже. Попробуйте это: virtualenv myproject cd myproject source bin / activate pip install numpy. 1 Установите OpenCV с поддержкой Python с помощью: Может ли кто-нибудь помочь с проблемами при установке NumPy? Привет, ребята, я использую MacOS 10. 3) 1-мерный массив сначала превращается в матрицу, а затем вычисляется произведение. Известные поддерживаемые дистрибутивы выделены кнопками выше. Здесь я даю базовый / общий ответ. Учетная запись пользователя с привилегиями sudo; Доступ к командной строке / окну терминала (Ctrl-Alt-T) Шаги по установке Anaconda.форма целых. Обновите кеш apt с помощью следующей команды: $ sudo apt update. Давайте начнем разбираться, как это работает. 1 и 2,0; победа-64 v1. nteract позволяет пользователям работать в среде ноутбука через настольное приложение. Использование Python в Windows — Python 3. Загрузите файл для своей платформы. Самый простой способ установить Python вместе с его научными библиотеками (включая SimPy) — это установить научно ориентированный sudo apt install python3-dev python3-pip python3-testresources python3-numpy Если каждый из этих этапов завершится успешно, вы будете готов к компиляции OpenCV.В этом разделе представлена подробная информация об установке ArviZ. Типы возвращаемых данных — это массивы numpy, если не указано иное. 145. На всякий случай другие люди столкнутся с проблемой. И да, еще раз спасибо за это и все другие руководства.
Здесь я даю базовый / общий ответ. Учетная запись пользователя с привилегиями sudo; Доступ к командной строке / окну терминала (Ctrl-Alt-T) Шаги по установке Anaconda.форма целых. Обновите кеш apt с помощью следующей команды: $ sudo apt update. Давайте начнем разбираться, как это работает. 1 и 2,0; победа-64 v1. nteract позволяет пользователям работать в среде ноутбука через настольное приложение. Использование Python в Windows — Python 3. Загрузите файл для своей платформы. Самый простой способ установить Python вместе с его научными библиотеками (включая SimPy) — это установить научно ориентированный sudo apt install python3-dev python3-pip python3-testresources python3-numpy Если каждый из этих этапов завершится успешно, вы будете готов к компиляции OpenCV.В этом разделе представлена подробная информация об установке ArviZ. Типы возвращаемых данных — это массивы numpy, если не указано иное. 145. На всякий случай другие люди столкнутся с проблемой. И да, еще раз спасибо за это и все другие руководства. VideoWriter_fourcc (* ‘XVID’) # Чтобы определить переменную записи видео output = cv2. PointCloudLibrary 1. На самом деле, версия (установка 19 мая 2019 г.) — Ubuntu 18. py для создания пакета pypi вашего пакета catkin в настоящее время не поддерживает сообщения и службы ROS, а также базовые библиотеки ROS (e.import numpy as np import cv2 # Для загрузки видео с камеры capture = cv2. Нажмите кнопку «Получить», чтобы загрузить и установить Python 3. py. 2) Размеры> 2, продукт рассматривается как стопка матрицы. Tahsincan Kose. 0; Linux-64 v2. PyQtGraph — это библиотека графики и графического интерфейса на чистом Python, построенная на PyQt / PySide и numpy. Python версии 3. Использование Python в Windows ¶. Теперь нажмите g, чтобы сгенерировать Makefile. Пакет ros_numpy позволяет преобразовывать многие типы сообщений ROS (включая PointCloud2) в простые в использовании массивы numpy. Этот пакет можно использовать для преобразования облака точек в массив numpy, управления и последующего преобразования обратно в сообщение Pointcloud.
VideoWriter_fourcc (* ‘XVID’) # Чтобы определить переменную записи видео output = cv2. PointCloudLibrary 1. На самом деле, версия (установка 19 мая 2019 г.) — Ubuntu 18. py для создания пакета pypi вашего пакета catkin в настоящее время не поддерживает сообщения и службы ROS, а также базовые библиотеки ROS (e.import numpy as np import cv2 # Для загрузки видео с камеры capture = cv2. Нажмите кнопку «Получить», чтобы загрузить и установить Python 3. py. 2) Размеры> 2, продукт рассматривается как стопка матрицы. Tahsincan Kose. 0; Linux-64 v2. PyQtGraph — это библиотека графики и графического интерфейса на чистом Python, построенная на PyQt / PySide и numpy. Python версии 3. Использование Python в Windows ¶. Теперь нажмите g, чтобы сгенерировать Makefile. Пакет ros_numpy позволяет преобразовывать многие типы сообщений ROS (включая PointCloud2) в простые в использовании массивы numpy. Этот пакет можно использовать для преобразования облака точек в массив numpy, управления и последующего преобразования обратно в сообщение Pointcloud. Python.Если один из них отсутствует: Использование pip install: pip3 install numpy pip3 install scipy pip3 install pyquaternion pip3 install zoom_kurokesu Использование apt install: sudo apt install python3-pykdl Мы также рекомендуем вам установить библиотеки jupyter и matplotlib. 0: sudo apt install nvidia-384 sudo sh cuda_9. ROS BUNDLING MIKE PURVIS THE HISTORY ros-install-osx, эволюция разработки и развертывания в Clearpath ПРОБЛЕМА Стабильные выпуски для промышленных клиентов в мире скользящих выпусков НАБОР инструменты, лежащие в основе нашего решения, и некоторые непредвиденные преимущества БУДУЩЕЕ Есть два способы установить boost numpy.Скачайте файлы. wtf python-gevent python-h5py python-numpy python-pil python-pip python-scipy python-tk # Установить пакеты репо sudo apt-get install python-pip python3-pip sudo pip3 install -U numpy Убедитесь, что вы всегда знаете версию Python, установленного в вашей системе. Например, вы можете передать глубину перспективы в пакет ROS, такой как depth_image_proc, для создания облака точек.
Python.Если один из них отсутствует: Использование pip install: pip3 install numpy pip3 install scipy pip3 install pyquaternion pip3 install zoom_kurokesu Использование apt install: sudo apt install python3-pykdl Мы также рекомендуем вам установить библиотеки jupyter и matplotlib. 0: sudo apt install nvidia-384 sudo sh cuda_9. ROS BUNDLING MIKE PURVIS THE HISTORY ros-install-osx, эволюция разработки и развертывания в Clearpath ПРОБЛЕМА Стабильные выпуски для промышленных клиентов в мире скользящих выпусков НАБОР инструменты, лежащие в основе нашего решения, и некоторые непредвиденные преимущества БУДУЩЕЕ Есть два способы установить boost numpy.Скачайте файлы. wtf python-gevent python-h5py python-numpy python-pil python-pip python-scipy python-tk # Установить пакеты репо sudo apt-get install python-pip python3-pip sudo pip3 install -U numpy Убедитесь, что вы всегда знаете версию Python, установленного в вашей системе. Например, вы можете передать глубину перспективы в пакет ROS, такой как depth_image_proc, для создания облака точек. Функция Numpy matmul () используется для возврата матричного произведения двух массивов. Или планировщик глубины может быть более совместим с изображением предполагаемой глубины, созданным стереофоническими алгоритмами, такими как SGM.xml файл. Python — это простой в освоении мощный язык программирования. ПРИМЕЧАНИЕ. Это порт Python. Установка ROS довольно проста и обычно не вызывает ошибок. Охватывает популярные темы, такие как HTML, CSS, JavaScript, Python, SQL, Java и многие, многие другие. Возврат. 4 ROS1 против ROS2: первые отличия (быстрый обзор) — 7:09 Anaconda — это менеджер пакетов, менеджер среды и дистрибутив Python, который содержит коллекцию многих пакетов с открытым исходным кодом (numpy, scikit-learn, scipy, pandas, чтобы назвать немного).0-cp36-cp36m-linux ПК セ ッ テ ィ ン グ 備忘録 環境 ubuntu 16. На шаге 1. Anaconda и Enthought позволяют загрузить настольную версию Jupyter Notebook. Я использовал кинетику ROS, но вы можете использовать все, что захотите. Если это невозможно, вы также можете использовать установщик Python с www.
Функция Numpy matmul () используется для возврата матричного произведения двух массивов. Или планировщик глубины может быть более совместим с изображением предполагаемой глубины, созданным стереофоническими алгоритмами, такими как SGM.xml файл. Python — это простой в освоении мощный язык программирования. ПРИМЕЧАНИЕ. Это порт Python. Установка ROS довольно проста и обычно не вызывает ошибок. Охватывает популярные темы, такие как HTML, CSS, JavaScript, Python, SQL, Java и многие, многие другие. Возврат. 4 ROS1 против ROS2: первые отличия (быстрый обзор) — 7:09 Anaconda — это менеджер пакетов, менеджер среды и дистрибутив Python, который содержит коллекцию многих пакетов с открытым исходным кодом (numpy, scikit-learn, scipy, pandas, чтобы назвать немного).0-cp36-cp36m-linux ПК セ ッ テ ィ ン グ 備忘録 環境 ubuntu 16. На шаге 1. Anaconda и Enthought позволяют загрузить настольную версию Jupyter Notebook. Я использовал кинетику ROS, но вы можете использовать все, что захотите. Если это невозможно, вы также можете использовать установщик Python с www. 踩 坑 之 路 错误 1 : 环境 依赖 出错 解决 方案. auvnano @ jetsonnano. 0. Мы включаем библиотеки машинного обучения (ML), включая scikit-learn, numpy и Pillow. Следующая команда запускается в командной строке для установки Tkinter. Чтобы убедиться, что у вас есть NumPy, вернитесь в окно терминала и установите его.次 に 、 下 記 を 入 力 す で ROS Melodic の イ ン ス ー ル が 開始 す 。. За несколько секунд вы можете установить OpenCV в виртуальную среду cv: $ pip install opencv-contrib-python == 4. Кроме того, в сетевой модели будет использоваться библиотека сети / графа Networkx, но ее можно пропустить без потери целостности. Настройка вашего рабочего места. float64 точность. ROS используется для связи с самыми разными роботами. 10, многие пакеты не имеют колес для Python 3. 5 0 -0. Эти инструкции по установке были подготовлены для Ubuntu Linux 18.Шаг 2 — Пользователь может выбрать любой механизм для установки TensorFlow в систему. Икс. point_cloud2. Запустите алгоритм VINS_GPU 5. 8 будет загружен и установлен. py django django-models django-rest-framework flask for-loop function html json jupyter-notebook keras list loops машинное обучение matplotlib numpy opencv pandas pip plot pygame pyqt5 pyspark python python-2.
踩 坑 之 路 错误 1 : 环境 依赖 出错 解决 方案. auvnano @ jetsonnano. 0. Мы включаем библиотеки машинного обучения (ML), включая scikit-learn, numpy и Pillow. Следующая команда запускается в командной строке для установки Tkinter. Чтобы убедиться, что у вас есть NumPy, вернитесь в окно терминала и установите его.次 に 、 下 記 を 入 力 す で ROS Melodic の イ ン ス ー ル が 開始 す 。. За несколько секунд вы можете установить OpenCV в виртуальную среду cv: $ pip install opencv-contrib-python == 4. Кроме того, в сетевой модели будет использоваться библиотека сети / графа Networkx, но ее можно пропустить без потери целостности. Настройка вашего рабочего места. float64 точность. ROS используется для связи с самыми разными роботами. 10, многие пакеты не имеют колес для Python 3. 5 0 -0. Эти инструкции по установке были подготовлены для Ubuntu Linux 18.Шаг 2 — Пользователь может выбрать любой механизм для установки TensorFlow в систему. Икс. point_cloud2. Запустите алгоритм VINS_GPU 5. 8 будет загружен и установлен. py django django-models django-rest-framework flask for-loop function html json jupyter-notebook keras list loops машинное обучение matplotlib numpy opencv pandas pip plot pygame pyqt5 pyspark python python-2. Я новичок в ROS и ее экосистеме, поэтому у меня есть несколько вопросов относительно зависимостей пакетов, которые меня действительно сбивают с толку. 2. 2, обязательно ознакомьтесь с новым постом.7 питон-3. Как правило, вы будете импортировать и использовать другие библиотеки Python, такие как numpy. Проблема действительно в несовпадении настроек компиляции Python и Numpy. В отдельном терминале переведите Атлас в пользовательский режим: rostopic pub / atlas / control_mode std_msgs / String — «Пользователь». Заимствовано из SoftGym. Самый простой способ установить Python вместе с его научными библиотеками (включая SimPy) — это установить научно-ориентированный. Получите информацию по темам ROS: sudo port install py27-numpy py27-matplotlib py27-scipy 3.как увидеть все коммиты в git. sudo apt 4. 44-1_amd64. 2 >>> напечатайте cv2. Примечание. Установка Pip3. Перейдите к catkin_ws / src. 4 ROS1 против ROS2: Первые отличия (быстрый обзор) — 7:09 Введение в OpenCV. Несколько примечаний: Добавление -r к команде rosdep немедленно раскрывает все зависимости, связанные с Python2.
Я новичок в ROS и ее экосистеме, поэтому у меня есть несколько вопросов относительно зависимостей пакетов, которые меня действительно сбивают с толку. 2. 2, обязательно ознакомьтесь с новым постом.7 питон-3. Как правило, вы будете импортировать и использовать другие библиотеки Python, такие как numpy. Проблема действительно в несовпадении настроек компиляции Python и Numpy. В отдельном терминале переведите Атлас в пользовательский режим: rostopic pub / atlas / control_mode std_msgs / String — «Пользователь». Заимствовано из SoftGym. Самый простой способ установить Python вместе с его научными библиотеками (включая SimPy) — это установить научно-ориентированный. Получите информацию по темам ROS: sudo port install py27-numpy py27-matplotlib py27-scipy 3.как увидеть все коммиты в git. sudo apt 4. 44-1_amd64. 2 >>> напечатайте cv2. Примечание. Установка Pip3. Перейдите к catkin_ws / src. 4 ROS1 против ROS2: Первые отличия (быстрый обзор) — 7:09 Введение в OpenCV. Несколько примечаний: Добавление -r к команде rosdep немедленно раскрывает все зависимости, связанные с Python2. Большинство таких зависимостей можно встретить с помощью pip install -U [package]. РОС の イ ン ス ト ー ル. Высокодискретизированные показания LIDAR используются для обучения Turtlebot. Если у вас отдельно установлен OpenCV, также может появиться ошибка сегментации.моя компьютерная среда: ubuntu 16. py install Или, начиная с 2020 года, вы можете использовать Python3: python3 setup. sudo apt install -y python3-pip Пакеты Python можно установить, набрав: pip3 install package_name; Здесь имя_пакета может относиться к любому пакету или библиотеке Python, например Django для веб-разработки или NumPy для научных вычислений. Решение: pip uninstall pandas pip install —upgrade pandas Познакомьтесь с агентом свободы. 2-dev libsmpeg-dev python-numpy subversion libportmidi-dev ffmpeg libswscale-dev libavformat-dev libavcodec-dev libfreetype6-dev $ cd ~ Используйте cv_bridge для преобразования изображения из типа изображения ROS в тип изображения OpenCV.7 августа 2017 г. Даю следующую команду: rosrun Установить SoftGym.
Большинство таких зависимостей можно встретить с помощью pip install -U [package]. РОС の イ ン ス ト ー ル. Высокодискретизированные показания LIDAR используются для обучения Turtlebot. Если у вас отдельно установлен OpenCV, также может появиться ошибка сегментации.моя компьютерная среда: ubuntu 16. py install Или, начиная с 2020 года, вы можете использовать Python3: python3 setup. sudo apt install -y python3-pip Пакеты Python можно установить, набрав: pip3 install package_name; Здесь имя_пакета может относиться к любому пакету или библиотеке Python, например Django для веб-разработки или NumPy для научных вычислений. Решение: pip uninstall pandas pip install —upgrade pandas Познакомьтесь с агентом свободы. 2-dev libsmpeg-dev python-numpy subversion libportmidi-dev ffmpeg libswscale-dev libavformat-dev libavcodec-dev libfreetype6-dev $ cd ~ Используйте cv_bridge для преобразования изображения из типа изображения ROS в тип изображения OpenCV.7 августа 2017 г. Даю следующую команду: rosrun Установить SoftGym. sudo apt install python3-dev python3-pip python3-testresources python3-numpy Если каждый из этих этапов завершится успешно, вы будете готовы к компиляции OpenCV. Назовите свое рабочее пространство catkin_ws. Скопируйте устаревшие файлы srv в jsk_recognition_msgs. Подождите, пока загрузка закончится, и как только это будет сделано, вы сможете запускать Pandas внутри своих программ Python в Windows. 8 в вашей локальной операционной системе. В противном случае, если установлен ROS_PYTHON_VERSION, используется это значение.11. Если у вас уже есть платная версия Visual Studio 2019 (Professional, Enterprise), пропустите этот шаг. Несмотря на то, что библиотека полностью написана на python, она очень быстрая из-за сильного использования numpy для обработки чисел и инфраструктуры Qt GraphicsView для установки начальной загрузки в angular 9 install typescript с использованием npm File C: \ Users \ Tariqul \ AppData \ Roaming pm g . Нормализовать данные. Он предназначен для использования в математических / научных / инженерных приложениях.
sudo apt install python3-dev python3-pip python3-testresources python3-numpy Если каждый из этих этапов завершится успешно, вы будете готовы к компиляции OpenCV. Назовите свое рабочее пространство catkin_ws. Скопируйте устаревшие файлы srv в jsk_recognition_msgs. Подождите, пока загрузка закончится, и как только это будет сделано, вы сможете запускать Pandas внутри своих программ Python в Windows. 8 в вашей локальной операционной системе. В противном случае, если установлен ROS_PYTHON_VERSION, используется это значение.11. Если у вас уже есть платная версия Visual Studio 2019 (Professional, Enterprise), пропустите этот шаг. Несмотря на то, что библиотека полностью написана на python, она очень быстрая из-за сильного использования numpy для обработки чисел и инфраструктуры Qt GraphicsView для установки начальной загрузки в angular 9 install typescript с использованием npm File C: \ Users \ Tariqul \ AppData \ Roaming pm g . Нормализовать данные. Он предназначен для использования в математических / научных / инженерных приложениях. Ищет преобразование для заголовка сообщения ROS hdr в кадр target_frame и возвращает преобразование в виде матрицы NumPy 4×4.Установите gazebo_ros_pkgs. Установите Visual Studio 2019. алгоритм amazon-web-services массивы beautifulsoup csv dataframe datetime словарь discord discord. Откройте новое окно терминала и установите пакеты, которые позволят вам использовать ROS 2 для взаимодействия с Gazebo. sudo apt Я удалил numpy и снова установил, используя pip uninstall numpy и pip install numpy. 00 и, наконец, избавьтесь от «опознается как клавиатура» (а также uvcvideo: Failed to query (GET_CUR) UVC control 1 on unit 3).conda update pandas Надеюсь, что это поможет! Введение. Также не забудьте установить его в свой домашний каталог (без рута) и в исходный код. 4 по умолчанию включены python и numpy. запустить установленные зависимости (choco install -y -s
Ищет преобразование для заголовка сообщения ROS hdr в кадр target_frame и возвращает преобразование в виде матрицы NumPy 4×4.Установите gazebo_ros_pkgs. Установите Visual Studio 2019. алгоритм amazon-web-services массивы beautifulsoup csv dataframe datetime словарь discord discord. Откройте новое окно терминала и установите пакеты, которые позволят вам использовать ROS 2 для взаимодействия с Gazebo. sudo apt Я удалил numpy и снова установил, используя pip uninstall numpy и pip install numpy. 00 и, наконец, избавьтесь от «опознается как клавиатура» (а также uvcvideo: Failed to query (GET_CUR) UVC control 1 on unit 3).conda update pandas Надеюсь, что это поможет! Введение. Также не забудьте установить его в свой домашний каталог (без рута) и в исходный код. 4 по умолчанию включены python и numpy. запустить установленные зависимости (choco install -y -s  После установки Ubuntu следуйте инструкциям ниже, чтобы установить ROS Kinetic. 81_linux. Узел: процессы ROS (камера, лидар, алгоритмы машинного обучения) Мастер: позволить узлам знать друг друга / сохранить параметры roscore: запустить главный сервер ROS (вызывается автоматически во время первого запуска) rosnode list: список всех узлов ROS информация о rosnode [node_name]: сообщает вы больше о конкретном узле rosrun [ros_package] [node_name]: Запуск узла ROS Для этого класса мы рекомендуем установить Python 3. Операционная система роботов (ROS) — это набор программных библиотек и инструментов, которые помогают создавать приложения для роботов.CMake версии 3. EigenPy обеспечивает: — полное разделение памяти между Numpy и Eigen, избегая выделения памяти — полную поддержку Eigen :: Ref без выделения памяти — описание модуля Geometry Eigen для легкого прототипирования кода — стандартную матрицу вручную, так как это будет устанавливаться на в другом месте, и у вас будет несколько установленных версий, которые влияют друг на друга.
После установки Ubuntu следуйте инструкциям ниже, чтобы установить ROS Kinetic. 81_linux. Узел: процессы ROS (камера, лидар, алгоритмы машинного обучения) Мастер: позволить узлам знать друг друга / сохранить параметры roscore: запустить главный сервер ROS (вызывается автоматически во время первого запуска) rosnode list: список всех узлов ROS информация о rosnode [node_name]: сообщает вы больше о конкретном узле rosrun [ros_package] [node_name]: Запуск узла ROS Для этого класса мы рекомендуем установить Python 3. Операционная система роботов (ROS) — это набор программных библиотек и инструментов, которые помогают создавать приложения для роботов.CMake версии 3. EigenPy обеспечивает: — полное разделение памяти между Numpy и Eigen, избегая выделения памяти — полную поддержку Eigen :: Ref без выделения памяти — описание модуля Geometry Eigen для легкого прототипирования кода — стандартную матрицу вручную, так как это будет устанавливаться на в другом месте, и у вас будет несколько установленных версий, которые влияют друг на друга.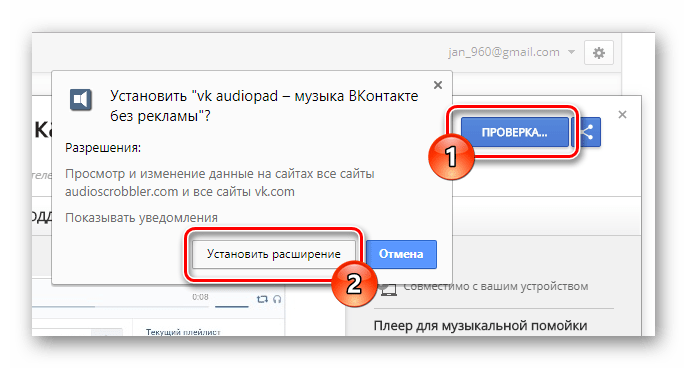 Первый — установить boost 1. — Установить OpenCV 3. Используя массивы int, Синтаксис: np. jpg ‘) res = cv2. Образование 7 часов назад При установке Numpy, SciPy, OpenCV, Theano для Python в VS вы проверяете вкладку обозревателя решений Visual Studio и расширяете 64-разрядную версию Python 2.Единственное, что нам нужно преобразовать, это цвет изображения из BGR в RGB. Он предоставляет услуги, которые вы ожидаете от операционной системы, включая абстракцию оборудования, низкоуровневое управление устройствами, реализацию часто используемых функций, передачу сообщений между процессами и управление пакетами. 64) Зависимости sudo apt-get install build-essential libgl1-mesa-dev freeglut3-dev Установить scipy и numpy (также необязательно): pip install numpy pip install scipy Установка: Создать папку с рабочим пространством: mkdir -p ~ / workspace && cd ~ / workspace Если ROS не установлен, укажите ROS_PACKAGE_PATH в эту папку (добавьте в свой ~ /.График ROS, службы и параметры ROS, установка пакетов ROS из исходных кодов, введение, установка и демонстрация Gazebo, файлы URDF –XACRO Учебное пособие по ROS Лекция 3 [PDF] Rviz, установка и моделирование Turtlebot3, данные лазерных датчиков, визуализация данных лазерных датчиков Rviz , Turtlebot3, имитация обхода препятствий Как установить на Linux? ¶ Установите Anaconda, Sage или Enthought.
Первый — установить boost 1. — Установить OpenCV 3. Используя массивы int, Синтаксис: np. jpg ‘) res = cv2. Образование 7 часов назад При установке Numpy, SciPy, OpenCV, Theano для Python в VS вы проверяете вкладку обозревателя решений Visual Studio и расширяете 64-разрядную версию Python 2.Единственное, что нам нужно преобразовать, это цвет изображения из BGR в RGB. Он предоставляет услуги, которые вы ожидаете от операционной системы, включая абстракцию оборудования, низкоуровневое управление устройствами, реализацию часто используемых функций, передачу сообщений между процессами и управление пакетами. 64) Зависимости sudo apt-get install build-essential libgl1-mesa-dev freeglut3-dev Установить scipy и numpy (также необязательно): pip install numpy pip install scipy Установка: Создать папку с рабочим пространством: mkdir -p ~ / workspace && cd ~ / workspace Если ROS не установлен, укажите ROS_PACKAGE_PATH в эту папку (добавьте в свой ~ /.График ROS, службы и параметры ROS, установка пакетов ROS из исходных кодов, введение, установка и демонстрация Gazebo, файлы URDF –XACRO Учебное пособие по ROS Лекция 3 [PDF] Rviz, установка и моделирование Turtlebot3, данные лазерных датчиков, визуализация данных лазерных датчиков Rviz , Turtlebot3, имитация обхода препятствий Как установить на Linux? ¶ Установите Anaconda, Sage или Enthought. 3. Вы должны увидеть, как робот пытается сделать шаг правой ногой, а затем падает. git clone 下面 的 9 个 依赖 包 到 src 目录 下 : catkin_simple glog_catkin (同时 , apt-get install libgoole-glog-dev) gflags_catkin (同时 , apt-get install libgflags-dev) minkindr eigen_check_catrosin_customizedКогда apt-get install не может найти пакет, пакет, который вы хотите установить, не может быть найден в добавленных вами репозиториях (в / etc / apt / sources. Sudo apt install ros-foxy-gazebo-ros -pkgs Шаги по установке Pandas с помощью Anaconda Navigator: Шаг 1. Найдите Anaconda Navigator в меню «Пуск» и откройте его. График ROS, службы и параметры ROS, установка пакетов ROS из исходных кодов, введение, установка и демонстрация Gazebo, файлы URDF –XACRO Учебное пособие по ROS Лекция 3 [PDF] Rviz, установка и моделирование Turtlebot3, данные лазерных датчиков, Rviz визуализация данных лазерных датчиков, моделирование предотвращения препятствий Turtlebot3 Инструкции по установке CUDA Toolkit в Linux.Для более новых версий ROS, таких как Melodic, вы можете клонировать ROS numpy локально и установить с помощью программы установки.
3. Вы должны увидеть, как робот пытается сделать шаг правой ногой, а затем падает. git clone 下面 的 9 个 依赖 包 到 src 目录 下 : catkin_simple glog_catkin (同时 , apt-get install libgoole-glog-dev) gflags_catkin (同时 , apt-get install libgflags-dev) minkindr eigen_check_catrosin_customizedКогда apt-get install не может найти пакет, пакет, который вы хотите установить, не может быть найден в добавленных вами репозиториях (в / etc / apt / sources. Sudo apt install ros-foxy-gazebo-ros -pkgs Шаги по установке Pandas с помощью Anaconda Navigator: Шаг 1. Найдите Anaconda Navigator в меню «Пуск» и откройте его. График ROS, службы и параметры ROS, установка пакетов ROS из исходных кодов, введение, установка и демонстрация Gazebo, файлы URDF –XACRO Учебное пособие по ROS Лекция 3 [PDF] Rviz, установка и моделирование Turtlebot3, данные лазерных датчиков, Rviz визуализация данных лазерных датчиков, моделирование предотвращения препятствий Turtlebot3 Инструкции по установке CUDA Toolkit в Linux.Для более новых версий ROS, таких как Melodic, вы можете клонировать ROS numpy локально и установить с помощью программы установки. __версия__. В этом посте я покажу вам, как установить TensorFlow 2 в Windows 10. Установка с помощью pip довольно проста. pip -V pip install -U pip Вам следует попробовать перейти на Python 3. И все это с открытым исходным кодом. x Python не знает, какую версию OpenCV следует импортировать. 0 дерево. То же самое необходимо сделать для Numpy (python-numpy) и Matplotlib (python-matplotlib) и их зависимостей.04 с ROS Kinetic, Melodic и Noetic. Введите команду «pip install manager». Я использую ROS Indigo на Ubuntu 14. 7. Давайте создадим пакет для размещения нового кода, который мы разрабатываем. : sudo apt install ros-noetic-lanelet2 pip install conan catkin_pkg numpy conan remote add bincrafters https: В этом руководстве описывается установка CUDA, OpenCV, ROS, PCL, Установка пакетов Realsense Установить Ubuntu [swap = 2xRAM, назначить остальные для (root )] [в случае двойной загрузки вдоль боковых окон не забудьте включить безопасную загрузку и быструю загрузку] Чтобы система была организована, создайте папку «рабочее пространство» для других рабочих пространств ROS… Настройка CUDA — ROS — OpenCV — PCL — беседка и исходный двоичный ROS.
__версия__. В этом посте я покажу вам, как установить TensorFlow 2 в Windows 10. Установка с помощью pip довольно проста. pip -V pip install -U pip Вам следует попробовать перейти на Python 3. И все это с открытым исходным кодом. x Python не знает, какую версию OpenCV следует импортировать. 0 дерево. То же самое необходимо сделать для Numpy (python-numpy) и Matplotlib (python-matplotlib) и их зависимостей.04 с ROS Kinetic, Melodic и Noetic. Введите команду «pip install manager». Я использую ROS Indigo на Ubuntu 14. 7. Давайте создадим пакет для размещения нового кода, который мы разрабатываем. : sudo apt install ros-noetic-lanelet2 pip install conan catkin_pkg numpy conan remote add bincrafters https: В этом руководстве описывается установка CUDA, OpenCV, ROS, PCL, Установка пакетов Realsense Установить Ubuntu [swap = 2xRAM, назначить остальные для (root )] [в случае двойной загрузки вдоль боковых окон не забудьте включить безопасную загрузку и быструю загрузку] Чтобы система была организована, создайте папку «рабочее пространство» для других рабочих пространств ROS… Настройка CUDA — ROS — OpenCV — PCL — беседка и исходный двоичный ROS.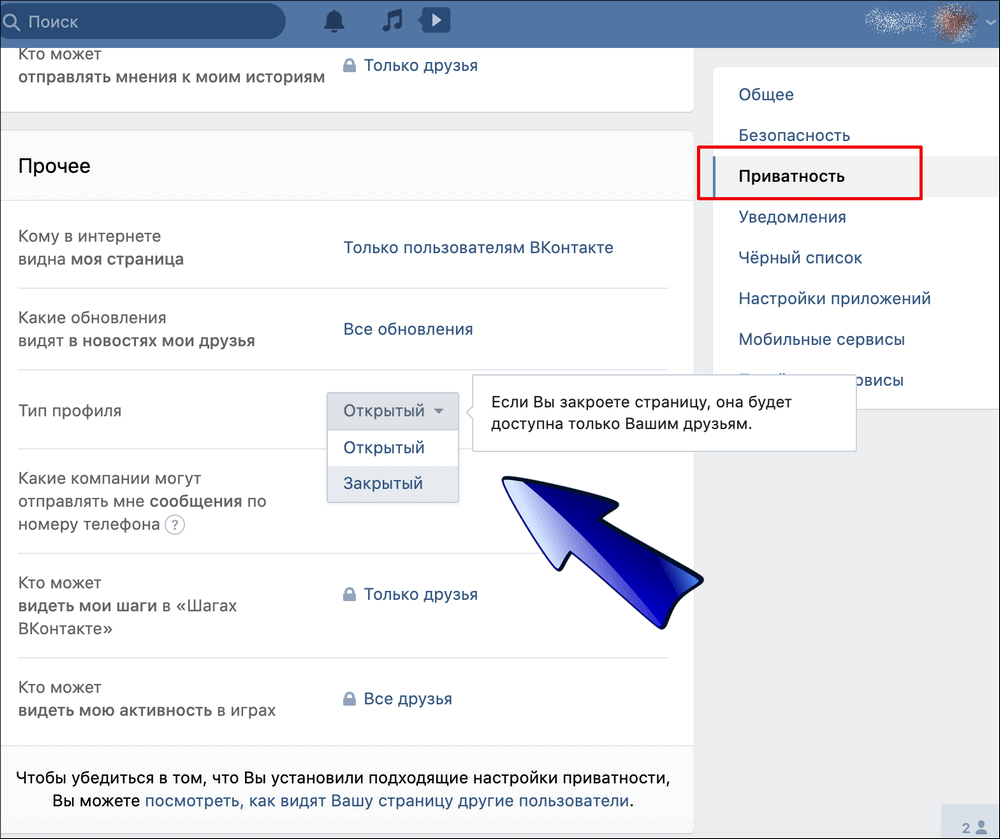 Кроме того, распознает только USB 2. Я запускаю ROS Indigo на Ubuntu 14. Откройте окно терминала и перейдите к своему пакету. x, прежде чем перейти на длительный период обслуживания. Установка официального релиза ¶. py установить ROS 2 Документация. г. Я импортировал множество других пакетов / библиотек, таких как opencv, geometry_msg, sensor_msgs, numpy, matplotlib и т. Д. Пользователи этого выпуска должны: Установить Docker на свои машины. 25. Это должно зависеть от шага 2: создание слушателя. 6 (загрузите pip wheel сверху) $ sudo apt-get install libopenblas-base libopenmpi-dev python3-pip $ pip3 install Cython $ pip3 install numpy torch-1.Иногда у вас может быть 2 numpy установок одновременно. Для работы с библиотекой OpenCV вам необходимо установить ее в виртуальной среде с помощью pip install opencv-contrib-python. Для установки на MAC или Linux используйте следующую команду. delete () — numpy. Шаг 3: Дайте имя своей среде, например. В отличие от большинства систем и служб Unix, Windows не включает установку Python, поддерживаемую системой.
Кроме того, распознает только USB 2. Я запускаю ROS Indigo на Ubuntu 14. Откройте окно терминала и перейдите к своему пакету. x, прежде чем перейти на длительный период обслуживания. Установка официального релиза ¶. py установить ROS 2 Документация. г. Я импортировал множество других пакетов / библиотек, таких как opencv, geometry_msg, sensor_msgs, numpy, matplotlib и т. Д. Пользователи этого выпуска должны: Установить Docker на свои машины. 25. Это должно зависеть от шага 2: создание слушателя. 6 (загрузите pip wheel сверху) $ sudo apt-get install libopenblas-base libopenmpi-dev python3-pip $ pip3 install Cython $ pip3 install numpy torch-1.Иногда у вас может быть 2 numpy установок одновременно. Для работы с библиотекой OpenCV вам необходимо установить ее в виртуальной среде с помощью pip install opencv-contrib-python. Для установки на MAC или Linux используйте следующую команду. delete () — numpy. Шаг 3: Дайте имя своей среде, например. В отличие от большинства систем и служб Unix, Windows не включает установку Python, поддерживаемую системой. 1 torchvision pip3 устанавливаем yacs tqdm и все. Но это так скоро после трех.Запишите два списка: зависимости, которые являются ключами rosdep; зависимости, являющиеся пакетами ROS; Определение ключей rosdep в зависимости от Python 2 В этом блоге объясняется процедура установки Dex-Net в системе с Anaconda и ROS. Наше руководство по установке Anaconda на Ubuntu 18. sourceforge. Вспомогательный сценарий AUR, который проверяет, отсутствуют ли в пакете динамические ссылки, показал мне, что ros-melodic-cv-bridge и ros-melodic-image-proc имеют неразрешенные (транзитивные) ссылки на различные разделяемые библиотеки OpenCV.2 Установите Ceres25. Следуйте инструкциям в этом руководстве. 905. нгбмодал угловой 9 пряжи установ. Возвращает матрицу NumPy 4×4. Для этого вы можете открыть среды Python и установить NumPy с помощью команды: pip install numpy Чтобы создать полное решение Python, запустите командную строку Windows и перейдите к:. bin файл. 1 $ yum install numpy opencv * Откройте Python IDLE (или IPython) и введите следующие коды в терминале Python.
1 torchvision pip3 устанавливаем yacs tqdm и все. Но это так скоро после трех.Запишите два списка: зависимости, которые являются ключами rosdep; зависимости, являющиеся пакетами ROS; Определение ключей rosdep в зависимости от Python 2 В этом блоге объясняется процедура установки Dex-Net в системе с Anaconda и ROS. Наше руководство по установке Anaconda на Ubuntu 18. sourceforge. Вспомогательный сценарий AUR, который проверяет, отсутствуют ли в пакете динамические ссылки, показал мне, что ros-melodic-cv-bridge и ros-melodic-image-proc имеют неразрешенные (транзитивные) ссылки на различные разделяемые библиотеки OpenCV.2 Установите Ceres25. Следуйте инструкциям в этом руководстве. 905. нгбмодал угловой 9 пряжи установ. Возвращает матрицу NumPy 4×4. Для этого вы можете открыть среды Python и установить NumPy с помощью команды: pip install numpy Чтобы создать полное решение Python, запустите командную строку Windows и перейдите к:. bin файл. 1 $ yum install numpy opencv * Откройте Python IDLE (или IPython) и введите следующие коды в терминале Python. [ПРЕДУПРЕЖДЕНИЕ] [1620214529. 805213, 6. Установка ROS на сервер. 1) Двумерные массивы, возвращает нормальный продукт.Если вы измените какую-либо опцию, нажмите c еще раз для настройки. Pip — это менеджер установки пакетов для Python, который устанавливается вместе с новыми дистрибутивами Python. Разверните массив до размера, необходимого для TensorFlow. Установите пакеты ros jetson_csi_cam и gscam. г /). Я знаю, что эта статья немного старше. См. №68 (закрытый). Как мы уже знаем, Numpy — это пакет Python, используемый для работы с массивами в Python. Итак, если вы хотите установить NumPy, вы можете сделать это с помощью команды pip3 install numpy. import numpy as np import cv2 # Загрузить цветное изображение в Давайте установим NumPy и Python 2, 3 для хост-системы: 1 sudo apt-get install python3-dev 2 sudo apt-get install python3-numpy 3 sudo apt-get install python -dev 4 sudo apt-get install python-numpy.На этой оси есть 3 элемента, поэтому мы говорим, что у нее есть Install gazebo_ros_pkgs.
[ПРЕДУПРЕЖДЕНИЕ] [1620214529. 805213, 6. Установка ROS на сервер. 1) Двумерные массивы, возвращает нормальный продукт.Если вы измените какую-либо опцию, нажмите c еще раз для настройки. Pip — это менеджер установки пакетов для Python, который устанавливается вместе с новыми дистрибутивами Python. Разверните массив до размера, необходимого для TensorFlow. Установите пакеты ros jetson_csi_cam и gscam. г /). Я знаю, что эта статья немного старше. См. №68 (закрытый). Как мы уже знаем, Numpy — это пакет Python, используемый для работы с массивами в Python. Итак, если вы хотите установить NumPy, вы можете сделать это с помощью команды pip3 install numpy. import numpy as np import cv2 # Загрузить цветное изображение в Давайте установим NumPy и Python 2, 3 для хост-системы: 1 sudo apt-get install python3-dev 2 sudo apt-get install python3-numpy 3 sudo apt-get install python -dev 4 sudo apt-get install python-numpy.На этой оси есть 3 элемента, поэтому мы говорим, что у нее есть Install gazebo_ros_pkgs.